
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
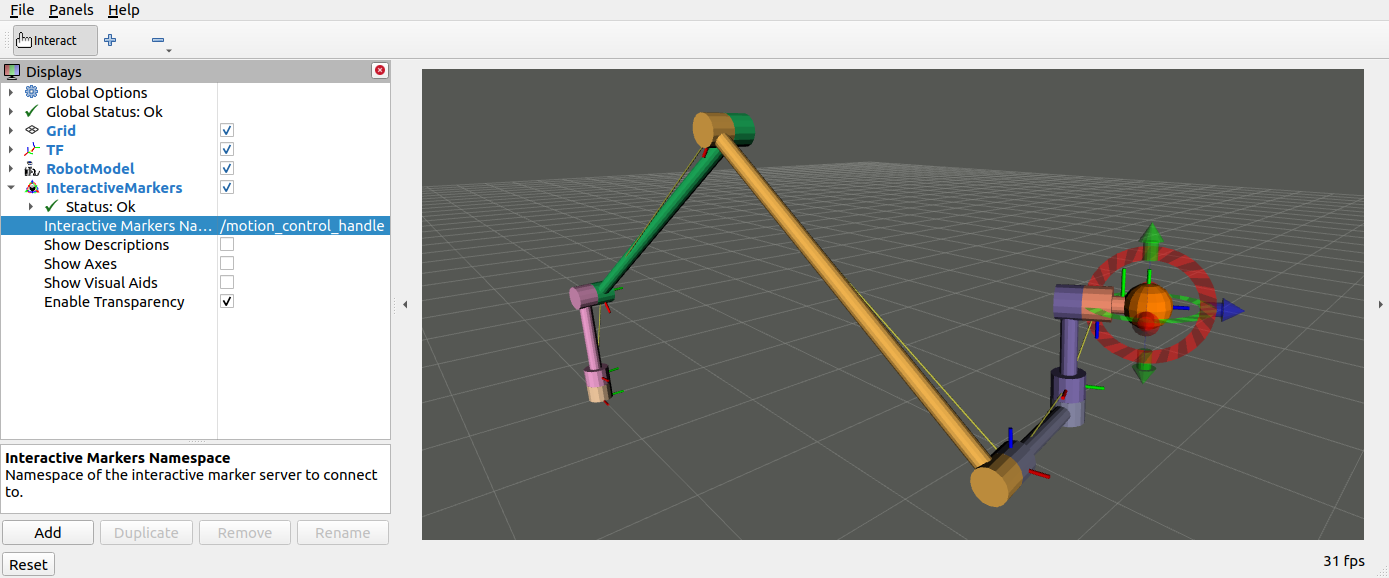
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |
Launch files
Messages
Services
Plugins
Recent questions tagged cartesian_controller_handles at Robotics Stack Exchange
|
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |
Launch files
Messages
Services
Plugins
Recent questions tagged cartesian_controller_handles at Robotics Stack Exchange
|
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |
Launch files
Messages
Services
Plugins
Recent questions tagged cartesian_controller_handles at Robotics Stack Exchange
|
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |
Launch files
Messages
Services
Plugins
Recent questions tagged cartesian_controller_handles at Robotics Stack Exchange
|
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |
Launch files
Messages
Services
Plugins
Recent questions tagged cartesian_controller_handles at Robotics Stack Exchange
|
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |
Launch files
Messages
Services
Plugins
Recent questions tagged cartesian_controller_handles at Robotics Stack Exchange
|
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |
Launch files
Messages
Services
Plugins
Recent questions tagged cartesian_controller_handles at Robotics Stack Exchange
|
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |
Launch files
Messages
Services
Plugins
Recent questions tagged cartesian_controller_handles at Robotics Stack Exchange
|
|
cartesian_controller_handles package from cartesian_controllers repocartesian_compliance_controller cartesian_controller_base cartesian_controller_handles cartesian_controller_simulation cartesian_controller_tests cartesian_controller_utilities cartesian_force_controller cartesian_motion_controller |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- scherzin
Authors
- Stefan Scherzinger
Cartesian Controller Handles
This package provides graphical click-and-drop handles (interactive markers) for
RViz to be used in conjunction with the cartesian_motion_controller and the cartesian_compliance_controller.
The markers can be used to control the robot end-effector manually through RViz, which is especially handy for testing scenarios and Cartesian trajectory teaching.
Getting started
The controller handles are implemented as ROS2 controllers and are managed by the controller_manager.
Here are the typical entries in an example controller_manager.yaml:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
motion_control_handle:
type: cartesian_controller_handles/MotionControlHandle
# More controller instances here
# ...
motion_control_handle:
ros__parameters:
end_effector_link: "tool0"
robot_base_link: "base_link"
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
# More controller specifications here
# ...
When active, the motion_control_handle from above will publish a geometry_msgs/PoseStamped to the /target_frame topic with the coordinates of the interactive marker in RViz.
You can then use this topic to steer controllers of both the cartesian_motion_controller/CartesianMotionController and the cartesian_compliance_controller/CartesianComplianceController type.
Conventional ROS2 topic remappings will help you setup your preferred configuration with various controllers and handles.
Note: The motion control handles publish their target frames continuously,
even if you don’t touch the interactive marker in RViz. If you want to send
targets to the controllers via scripts (productive use case), make sure to deactivate the
motion_control_handle through the controller manager so that it does not compete with your script.
Also have a look at the cartesian_controller_simulation package for an example setup in simulation.
RViz
You need to create a visualization in RViz to see and interact with the colored handles. Add InteractiveMarkers to your Displays menu and point it to the right Update Topic.
The interactive handle only gets visualized if your motion control handle is active. If you still see no handles, try toggling the Interactive Markers’s checkbox.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| cartesian_controller_base | |
| controller_interface | |
| geometry_msgs | |
| interactive_markers | |
| kdl_parser | |
| pluginlib | |
| rclcpp | |
| urdf |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cartesian_controller_tests |