
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
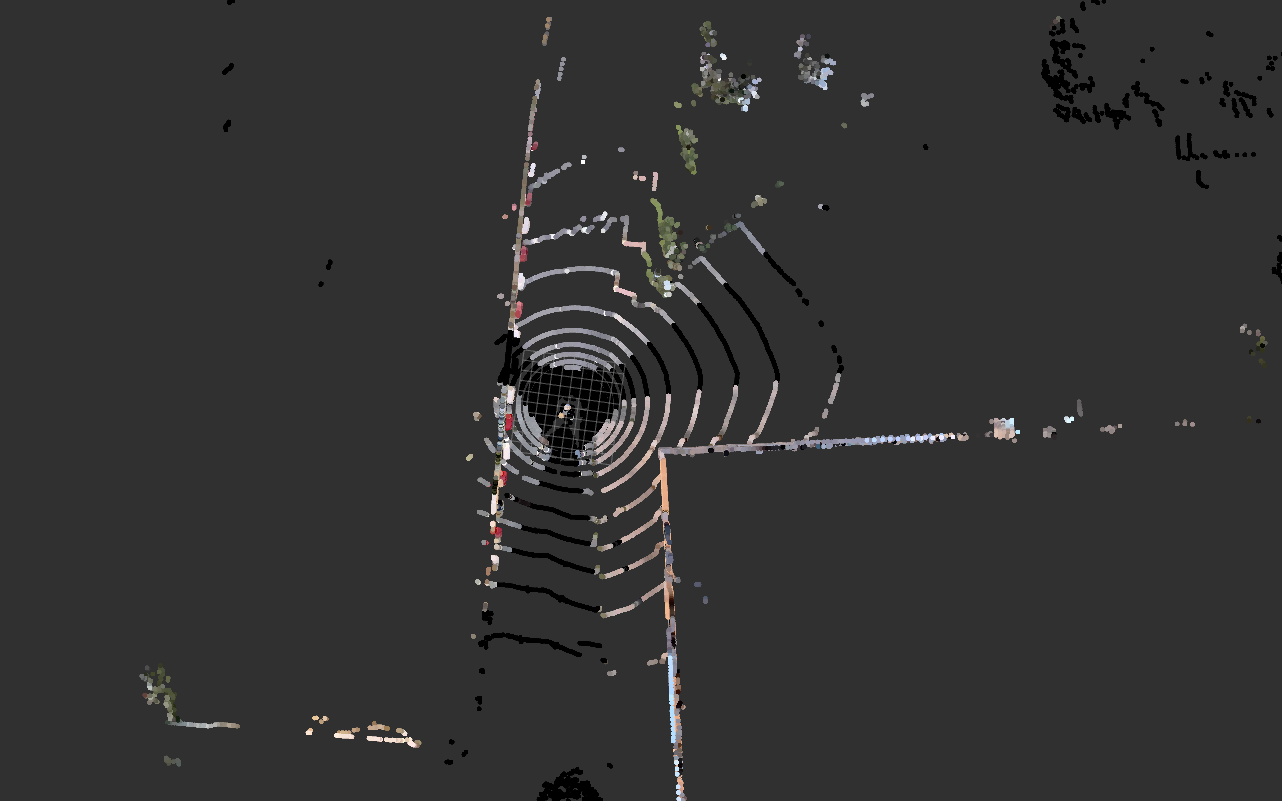
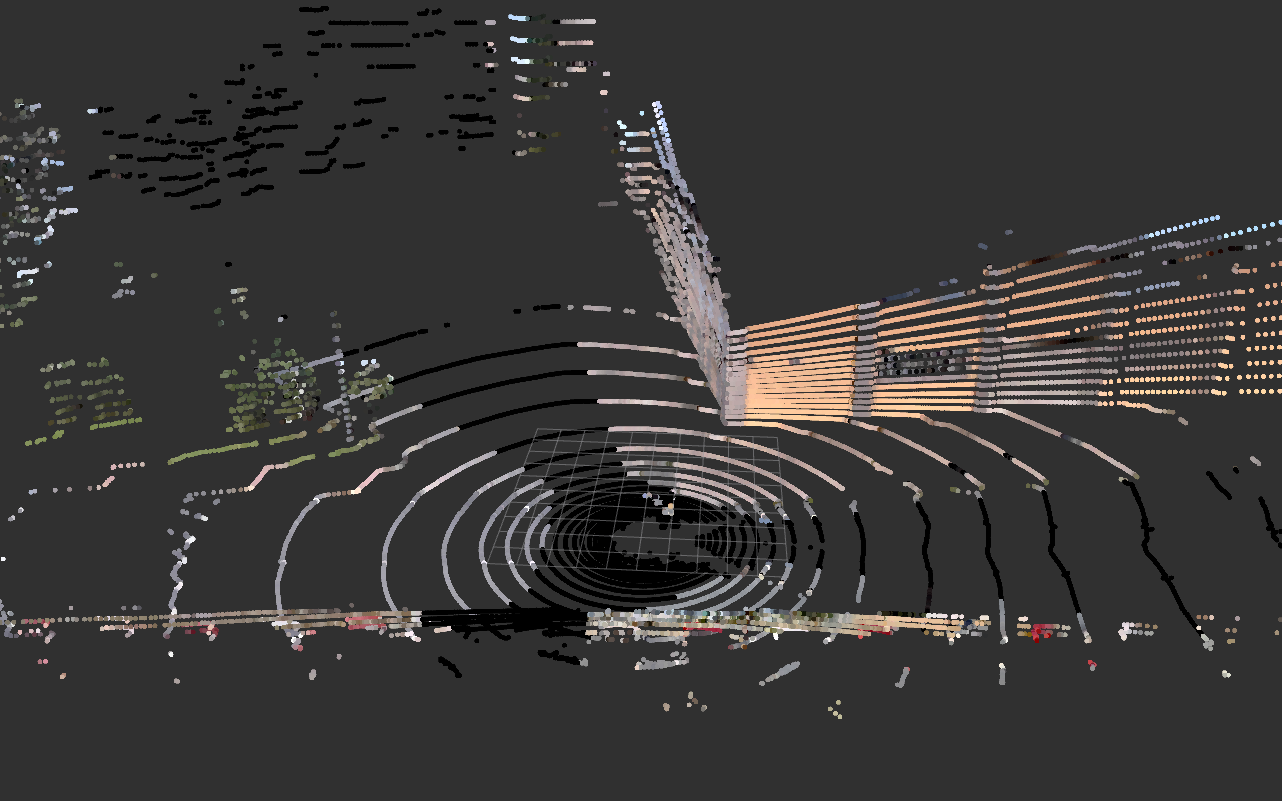
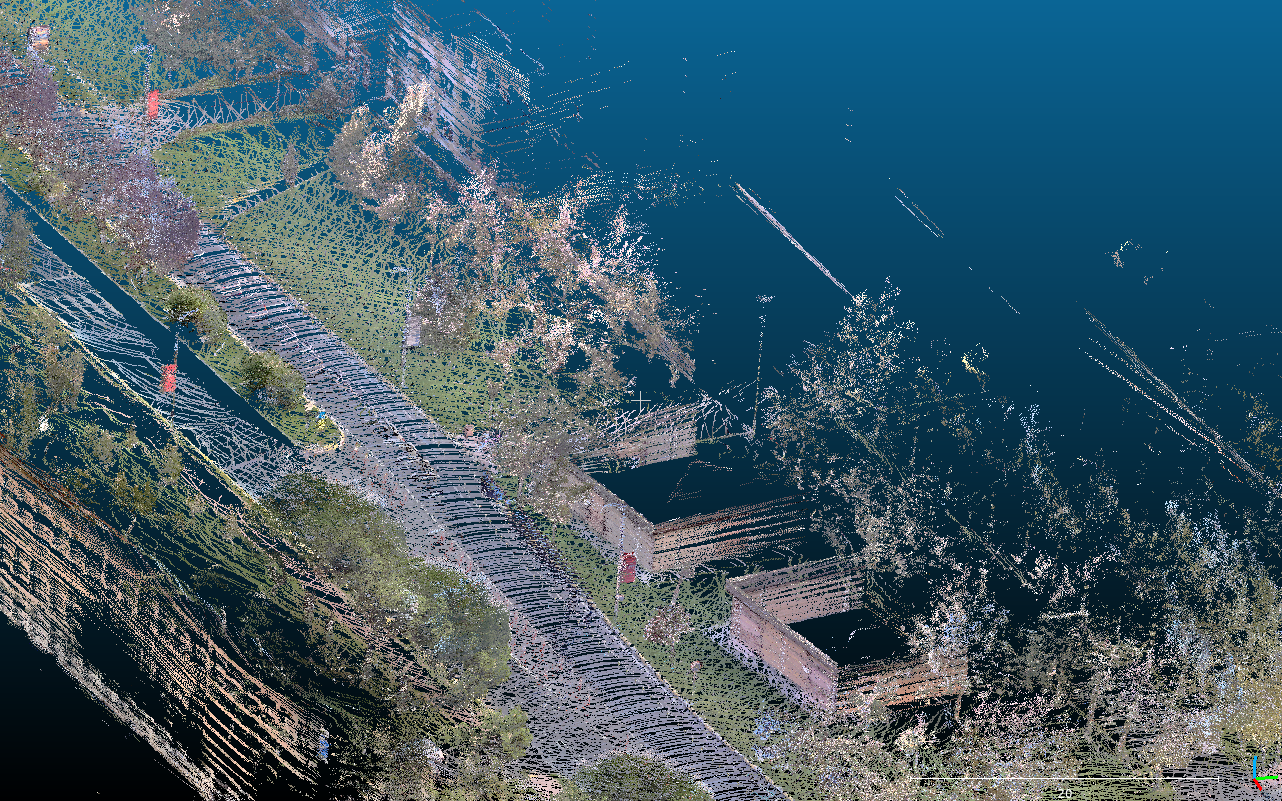
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
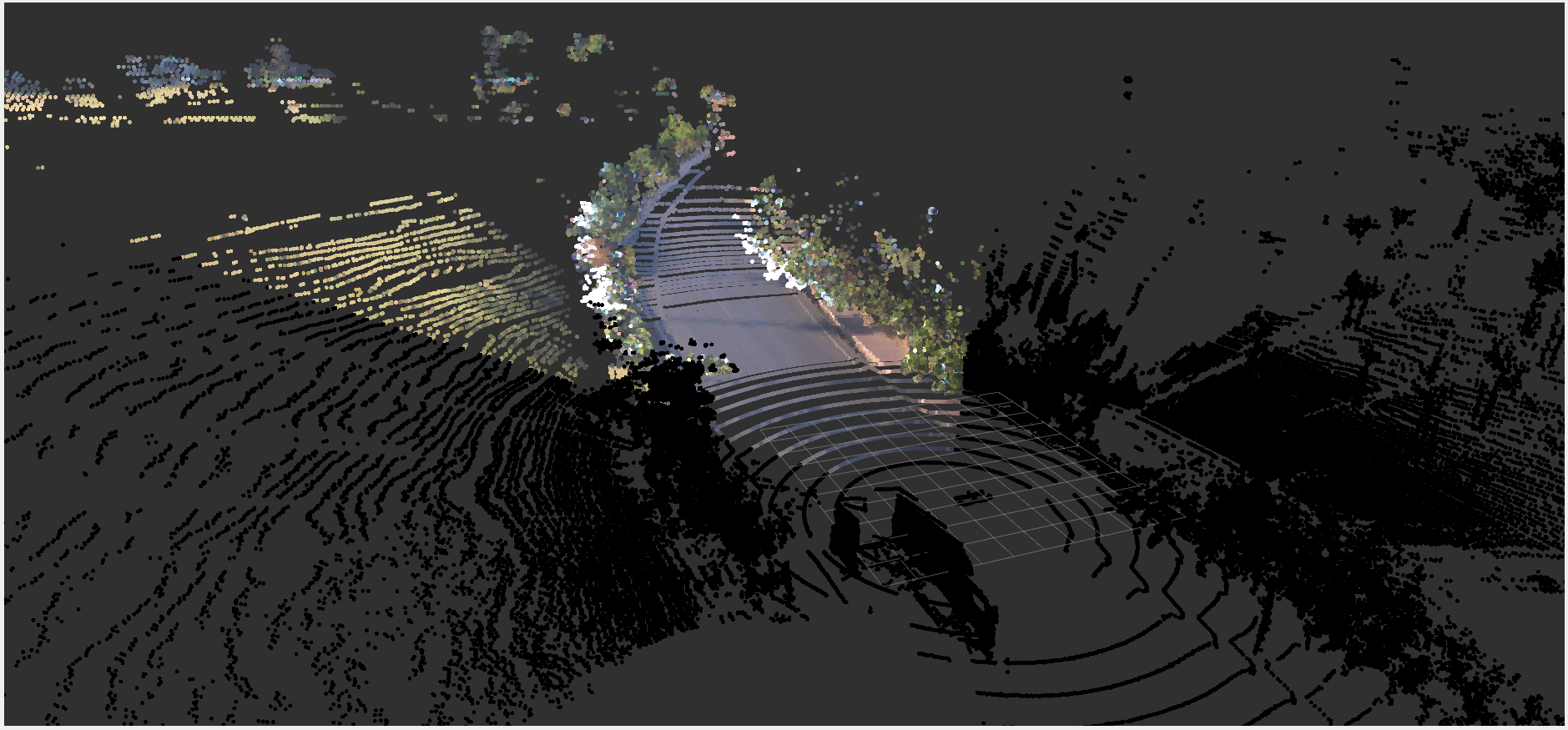

Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
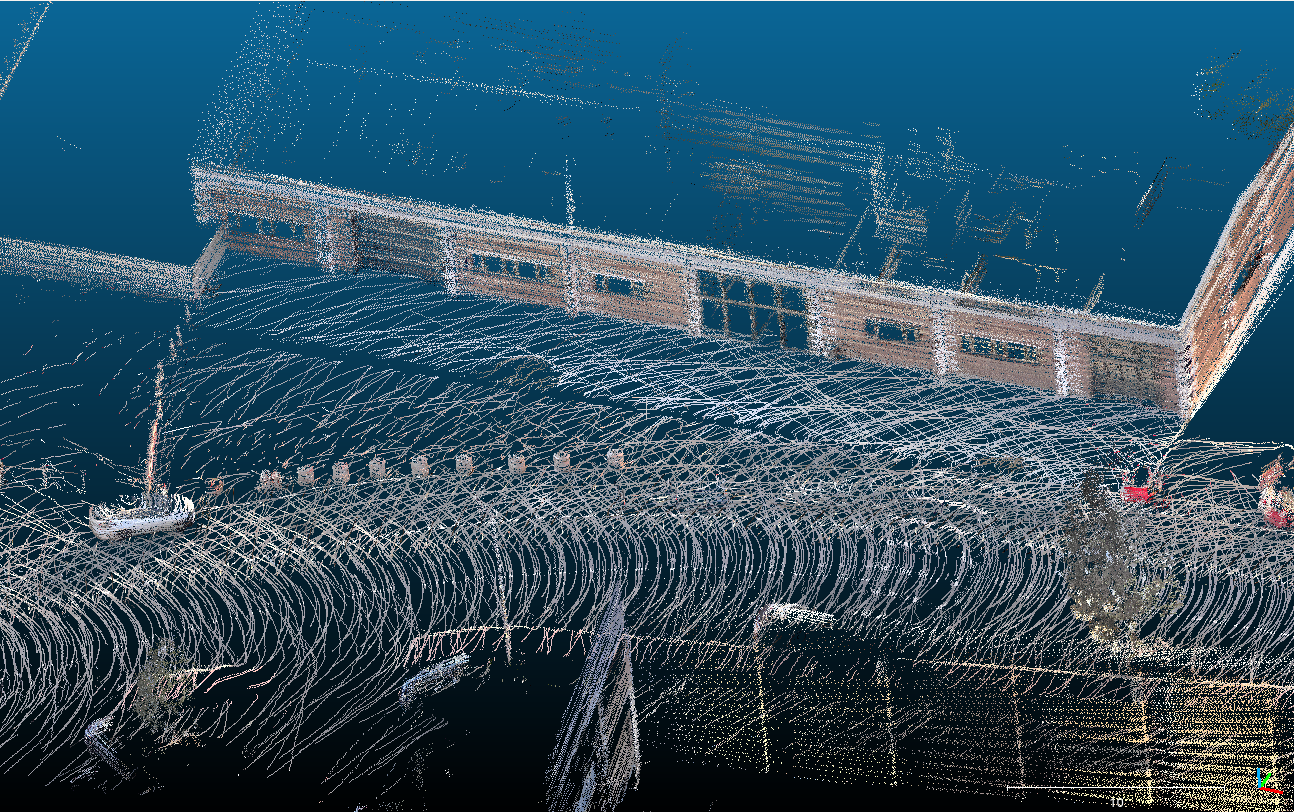
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]
Messages
Services
Plugins
Recent questions tagged color_point_cloud at Robotics Stack Exchange
|
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]
Messages
Services
Plugins
Recent questions tagged color_point_cloud at Robotics Stack Exchange
|
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]
Messages
Services
Plugins
Recent questions tagged color_point_cloud at Robotics Stack Exchange
|
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]
Messages
Services
Plugins
Recent questions tagged color_point_cloud at Robotics Stack Exchange
|
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]
Messages
Services
Plugins
Recent questions tagged color_point_cloud at Robotics Stack Exchange
|
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]
Messages
Services
Plugins
Recent questions tagged color_point_cloud at Robotics Stack Exchange
|
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]
Messages
Services
Plugins
Recent questions tagged color_point_cloud at Robotics Stack Exchange
|
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]
Messages
Services
Plugins
Recent questions tagged color_point_cloud at Robotics Stack Exchange
|
|
color_point_cloud package from color-point-cloud repocolor_point_cloud |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/leo-drive/color-point-cloud.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-15 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bzeren
Authors
color-point-cloud
Tool for colorize point cloud with images from camera. This tool takes a point cloud and dynamic number of images from camera via ROS2 and colorize the point cloud with the images.
Installation
Prerequisites
- ROS2 (tested with Humble)
- OpenCV
- PCL
- Eigen3
Build
mkdir -p ~/color-point-cloud_ws/src
cd ~/color-point-cloud_ws/src
git clone https://github.com/leo-drive/color-point-cloud
cd ..
colcon build --symlink-install
Usage
Run
source ~/color-point-cloud_ws/install/setup.bash
ros2 launch color_point_cloud color_point_cloud.launch.xml
Parameters
Change parameters in color_point_cloud.launch.xml to fit your environment.
| Parameter | Description |
|---|---|
point_cloud_topic |
your lidar topic as string
|
point_cloud_frame_id |
your lidar topic as string
|
camera_topics |
array of your camera topics as string
|
image_type |
your image format enum
|
Result
Projection Lucid Vision Triton 5.4 MP 120° camera onto Velodyne Alpha Prime LiDAR
Projection AC-IMX390 camera onto RoboSense Helios 32 beam LiDAR
SLAM results with LIO-SAM (link)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
- launch/color_point_cloud.launch.xml
-
- timeout_sec [default: 0.1]
- point_cloud_topic [default: /sensing/lidar/top/pointcloud_raw]
- point_cloud_frame_id [default: rs_helios_top]
- camera_topics [default: [/sensing/camera/camera0/, /sensing/camera/camera1/, /sensing/camera/camera2/, /sensing/camera/camera3/]]
- image_type [default: 0]
- image_topic_last_name [default: image_raw]
- camera_info_topic_last_name [default: camera_info]