
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior

Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
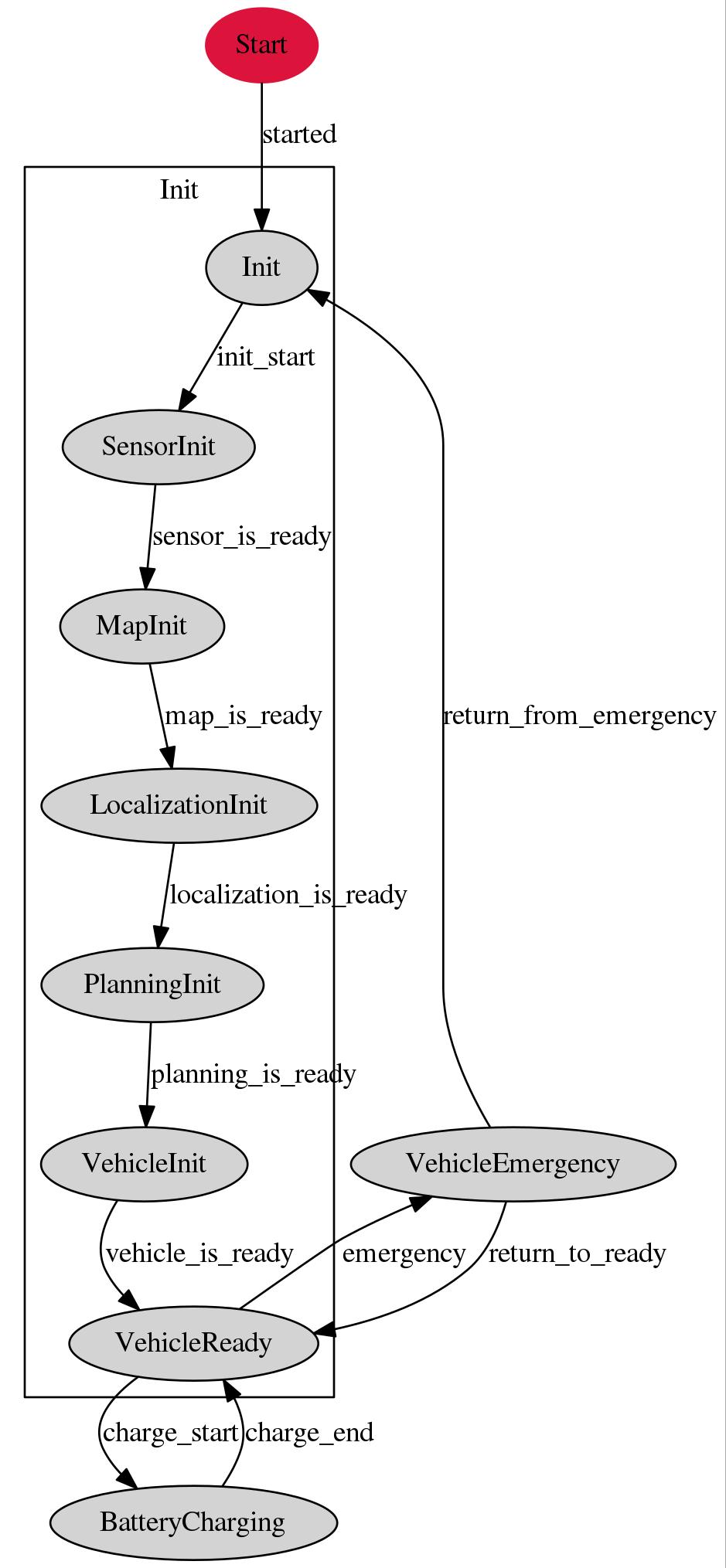
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
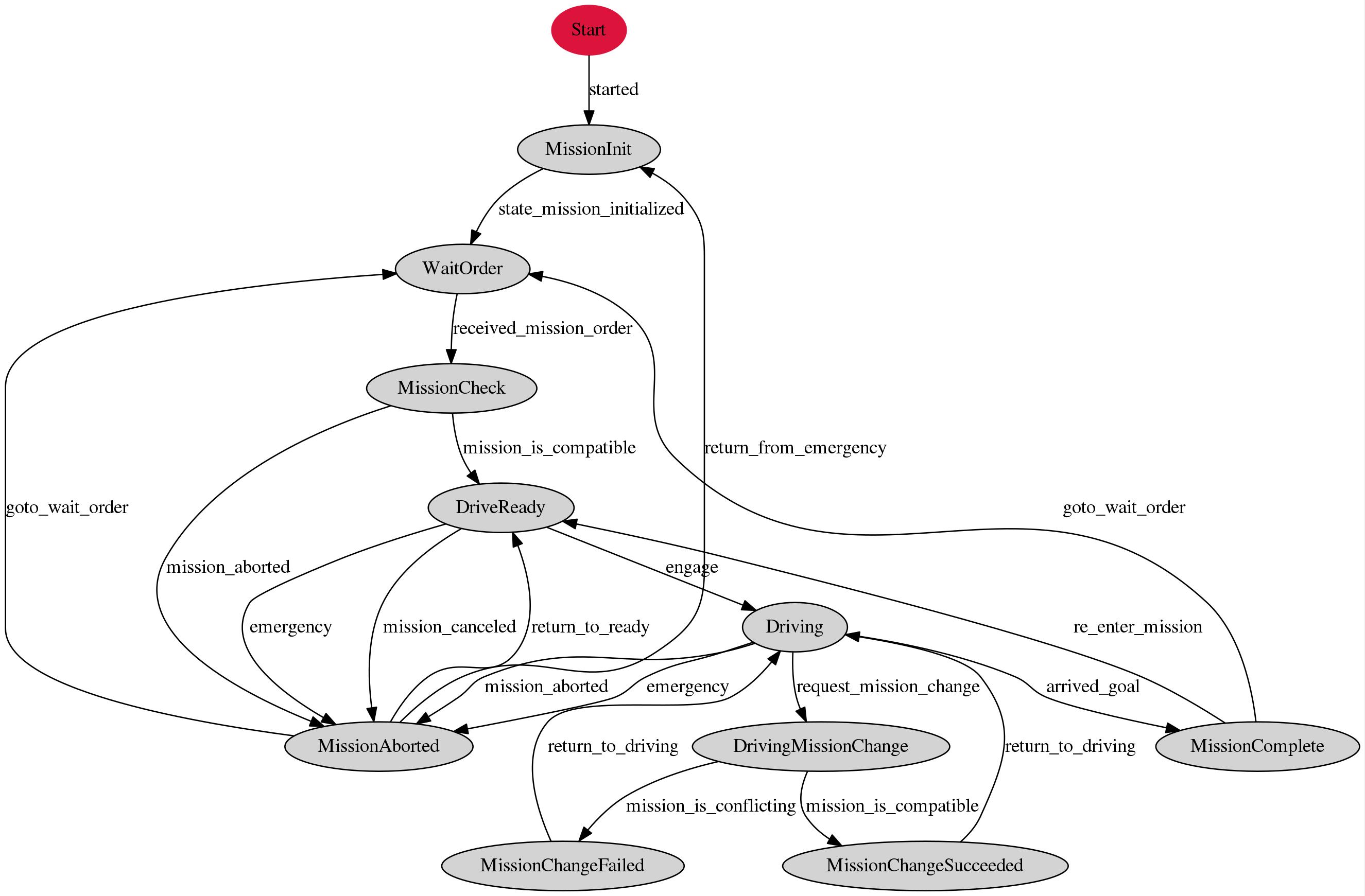
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]
Messages
Services
Plugins
Recent questions tagged decision_maker at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior
Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]
Messages
Services
Plugins
Recent questions tagged decision_maker at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior
Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]
Messages
Services
Plugins
Recent questions tagged decision_maker at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior
Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]
Messages
Services
Plugins
Recent questions tagged decision_maker at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior
Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]
Messages
Services
Plugins
Recent questions tagged decision_maker at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior
Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]
Messages
Services
Plugins
Recent questions tagged decision_maker at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior
Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]
Messages
Services
Plugins
Recent questions tagged decision_maker at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior
Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]
Messages
Services
Plugins
Recent questions tagged decision_maker at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yusuke Fujii
Authors
- Yusuke Fujii
- Yusuke Fujii
Decision Maker
Overview
This feature is experimental.</br> Autoware package that manages the Vehicle status, given Mission(waypoints) status, Behavior and Motion status. Each status is managed by state machine.
Vehicle
Mission
Behavior
Motion
Runtime Manager Parameters
Parameter|Type|Description
–|—|–
auto_mission_reload|Bool|(default: false)
If this is set true, decision maker automatically reloads mission as new mission after previous mission is completed.
auto_engage|Bool|(default: false)
If this is set true, decision maker automatically engage immediately after ready to drive.
auto_mission_change|Bool|(default: false)
If this is set true, decision maker automatically change the mission(waypoint) without state_cmd when new mission is loaded while driving.
use_fms|Bool|(default: false)
This must be true in order to incoorporate with Autoware Management System
disuse_vector_map|Bool|(default: false)
If set true, decision_maker will bypass loading a vector map on startup.
num_of_steer_behind|Int|(default: 20)
lookup distance along waypoints to determine steering state(straight, turning right, or turning left)
change_threshold_dist|Double|(default: 1)
This is relevent only if use_fms is true.
If the distance from vehicle to closest waypoint in the new mission is further than change_threshold_dist [m], mission change fails.
change_threshold_angle|Double|(default:15)
This is relevent only if use_fms is true.
If the angle from vehicle to closest waypoint in the new mission is further than this change_threshold_dist [deg], mission change fails.
time_to_avoidance|Double|(default: 3)
If the vehicle is stuck for time_to_avoidance seconds (e.g. due to obstacles), the state transits to from “Go” to “Avoidance”.
goal_threshold_dist|Double|(default: 3)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_dist [m] to the goal.
goal_threshold_vel|Double|(default: 0.1)
Threshold used to check if vehicle has reached to the goal (i.e. end of waypoints). The vehicle must be less than goal_threshold_vel [m/s] to be treated as goal arrival.
ROS Parameters
Parameter|Type|Description –|—|– state_vehicle_file_name|string|file that defines vehicle state transition state_mission_file_name|string|file that defines mission state transition state_behavior_file_name|string|file that defines behavior state transition state_motion_file_name|string|file that defines motion state transition stopline_reset_count|int|This parameter is used if the vehicle stops at the stop line and moves backward without crossing the stop line. When the vehicle moves backward by this count of the waypoints, the stop line is recognized again.
Subscribed topics
Topic|Type|Objective
–|—|–
/based/lane_waypoints_array|autoware_msgs/LaneArray|waypoints for the vehicle to follow. (e.g. waypoints given from waypoint_loader node)
/change_flag|std_msgs/Int32|Vehicle will try to change lane if this flag is set. Publishes /lamp_cmd to change blinkers according to this flag. (0=straight, 1=right, 2=left)
/closest_waypoint|std_msgs/Int32|Closest waypoint index in waypoints given by /based/lane_waypoints_array.
/config/decision_maker|autoware_config_msgs::ConfigDecisionMaker|Parameters set from runtime manager
/current_pose|geometry_msgs/PoseStamped|Current pose of vehicle
/current_velocity|geometry_msgs/TwistStamped|Current velocity of vehicle
/filtered_points|sensor_msgs/PointCloud2|Used to check if sensor data is ready. This is meant to give pointcloud data used for ndt_matching.
/final_waypoints|autoware_msgs/Lane|resultant waypoints from planner nodes, e.g. from velocity_set node.
/obstacle_waypoint|std_msgs/Int32|Obstacle waypoint index. Used in “Go” state.
/state_cmd|std_msgs/String|Decision_maker will try to transit state according to the key given through this topic.
/state/stop_order_wpidx|std_msgs/Int32|Vehicle will try to stop at this index of waypoint. Used in “OrderedStop” state.
/vector_map_info/area|vector_map_msgs/AreaArray|Area information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/cross_road|vector_map_msgs/CrossRoadArray|Cross road information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/line|vector_map_msgs/LineArray|Line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/point|vector_map_msgs/PointArray|Point information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/road_sign|vector_map_msgs/RoadSignArray|Road sign information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/stop_line|vector_map_msgs/StopLineArray|Stop line information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
/vector_map_info/vector|vector_map_msgs/VectorArray|Vector information from vector map.
This is ignored unless area, cross_road, line, point, road_sign, stop_line, and vector are subscribed.
Published topics
Topic|Type|Objective
–|—|–
/decision_maker/available_transition|std_msgs/String|available transition from current state
/decision_maker/operator_help_text|jsk_rviz_plugins/OverlayText|Help message during operation
/decision_maker/state|std_msgs/String|current state for “Vehicle”, “Mission”, and “Drive” state machine.
/decision_maker/state_msg|autoware_msgs/State|current state for “Vehicle”, “Mission”, and “Drive” state machine with header.
/lamp_cmd|autoware_msgs/LampCmd|blinker command to vehicle (0=straight, 1=right, 2=left)
/lane_waypoints_array|autoware_msgs/LaneArray|waypoints passed down to following planners. (e.g. lane_rule)
/light_color_managed|autoware_msgs/TrafficLight|meant to publish light_color status. Not implemented yet.
/decision_maker/state_overlay|jsk_rviz_plugins/OverlayText|Current state as overlay_txt.
/state/stopline_wpidx|std_msgs/Int32|Index of waypoint for the vehicle to stop.
/decision_maker/target_velocity_array|std_msgs/Float64MultiArray| Array of target velocity obtained from final_waypoints.
/stop_location|autoware_msgs/VehicleLocation|Feedback to fms on the /state_stop_order_wpidx topic. It contains the index that the vehicle will stop and the id of the lane_array that the vehicle is using at the time.
State Description
Vehicle States
State name|Required topic|Description|Implementation
–|–|—|–
Init|-|The parent state of the following states.|-
SensorInit|/filtered_points|Waits until all sensors are ready.|Waits until /filtered_points is received unless wf_simulator node is launched.
LocalizationInit|/current_pose|Waits until localizer is ready | Waits until current_pose is converged. (i.e. ndt_matching is stable.)
PlanningInit|/closest_waypoint|Waits unil planners are ready | Subscriber is set for /closest_waypoint.
VehicleInit|-|Waits until vehicle is ready for departure.|No implementation goes directly to vehilce ready state.
VehicleReady|-|Vehicle is ready to move.|Exits to VehicleEmergency when emergency key is given by state_cmd from other states, or if emergency_flag is set true by other states.
BatteryCharging|-|Charging the battery|Waits until charging_end key by state_cmd from other nodes(e.g. by AMS).
VehicleEmergency|-|Emergency is detected somewhere in the system. |Waits until return_from_emergency or return_to_ready key is by /state_cmd (e.g. by DecisionMakerPanel)
Mission States
State name|Required topic|Description|Implementation –|–|—|– MissionInit|-|Initialization state of Mission State Machine.|Throws state_mission_initialized key if use_fms is set false.
File truncated at 100 lines see the full file
Changelog for package decision_maker
1.11.0 (2019-03-21)
- [Feature] Rebuild decision maker (#1609)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Cleanup WaypointState.msg and add sttering_state=STR_BACK (#1822)
- Contributors: Abraham Monrroy Cano, Kenji Funaoka, amc-nu, s-azumi
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Contributors: Esteve Fernandez, amc-nu
1.9.1 (2018-11-06)
1.9.0 (2018-10-31)
- Moved configuration messages to autoware_config_msgs
- [fix] PascalCase messages
(#1408)
- Switch message files to pascal case
- Switch message names to pascal case in Runtime Manager
- Switch message names to pascal case in *.yaml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/decision_maker.launch
-
- state_vehicle_file_name [default: autoware_state_vehicle.yaml]
- state_mission_file_name [default: autoware_state_mission.yaml]
- state_behavior_file_name [default: autoware_state_behavior.yaml]
- state_motion_file_name [default: autoware_state_motion.yaml]
- auto_mission_reload [default: false]
- auto_engage [default: false]
- auto_mission_change [default: false]
- use_fms [default: false]
- disuse_vector_map [default: false]
- param_num_of_steer_behind [default: 30]
- change_threshold_dist [default: 1.0]
- change_threshold_angle [default: 15]
- goal_threshold_dist [default: 3.0]
- goal_threshold_vel [default: 0.1]
- stopped_vel [default: 0.1]
- stopline_reset_count [default: 20]
- sim_mode [default: false]
- use_ll2 [default: false]
- stop_sign_id [default: stop_sign]
- insert_stop_line_wp [default: true]