
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()

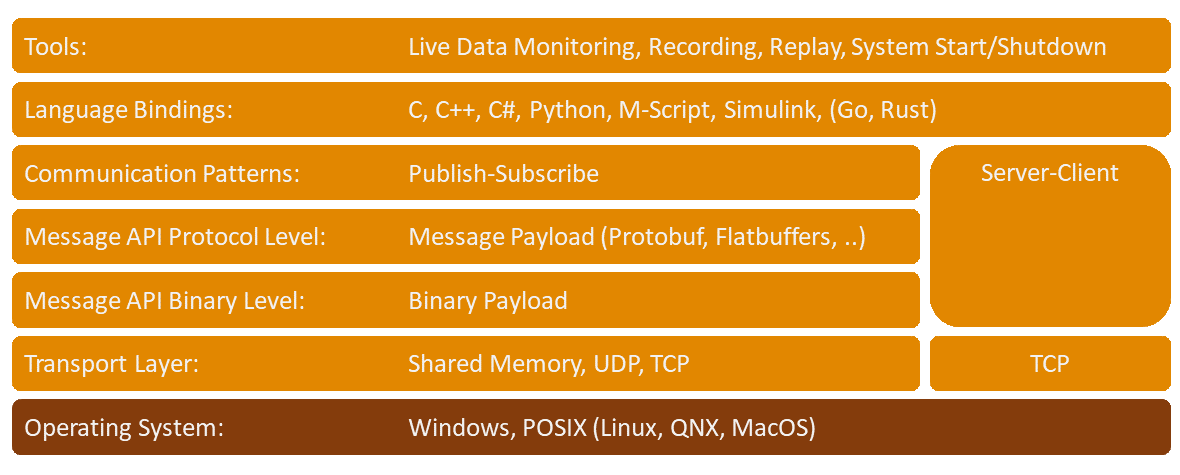
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
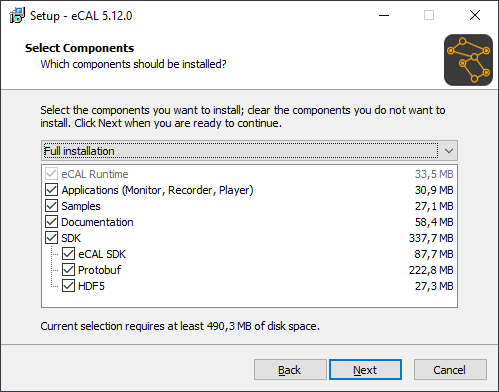
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ecal at Robotics Stack Exchange
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ecal at Robotics Stack Exchange
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ecal at Robotics Stack Exchange
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ecal at Robotics Stack Exchange
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ecal at Robotics Stack Exchange
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ecal at Robotics Stack Exchange
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ecal at Robotics Stack Exchange
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ecal at Robotics Stack Exchange
Package Summary
| Version | 6.0.0 |
| License | Apache 2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/eclipse-ecal/ecal.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Eclipse Foundation, Inc.
Authors
eCAL - enhanced Communication Abstraction Layer
![]()
![]()
![]()
The enhanced Communication Abstraction Layer (eCAL) is a middleware that enables scalable, high performance interprocess communication on a single computer node or between different nodes in a computer network. eCAL provides publish - subscribe and server - client pattern to connect different nodes in the network with almost no configuration required.
eCAL automatically chooses the best available data transport mechanism for each link, it supports:
- Shared memory for local communication (incredibly fast!)
- UDP and TCP for network communication
Visit the eCAL Documentation at 🌐 https://ecal.io for more information.
Architecture
Facts about eCAL
- eCAL is fast (1 - 20 GB/s, depends on payload size. Check the measured performance here)
- eCAL provides both publish-subscribe and server-client patterns
- eCAL is brokerless
- eCAL provides a C++ and C interface for easy integration into other languages (like python, csharp or rust)
- eCAL can be used in conjunction with Matlab Simulink as eCAL Simulink Toolbox for simulation and prototyping
- eCAL has powerful tools for recording, replay and monitoring all your data flows - decentralized
- eCAL is simple and zero-conf. No complex configuration for communication details and QOS settings are needed
- eCAL is message protocol agnostic. You choose the message protocol that fits to your needs like Google Protobuf, CapnProto, Flatbuffers…
- eCAL uses the standardized recording format HDF5
- eCAL integrates gently into your ROS2 environment with the eCAL RMW
-
eCAL supports Intel and arm platforms
- eCAL runs on a wide variety of operating systems:
- Windows (stable)
- Linux (stable)
- QNX (experimental)
- MacOS (experimental)
- FreeBSD (experimental)
Installation
We provide binary installers for Windows and Ubuntu. If you need further help installing and configuring eCAL, please refer to the documentation.
Windows
Download the latest eCAL Installer and follow the Setup Wizard
We only support 64bit Windows 10 / 11
Ubuntu
Install eCAL from our PPA:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
This PPA will always upgrade you to the latest eCAL Release (-> Rolling Release PPA). If you intend to stay on an specific release, check out other PPAs here.
Ubuntu 18.04, 20.04, 22.04, 24.04 for CPU architectures amd64, armhf, arm64 are supported at the time of writing. Non-LTS versions of Ubuntu are usually supported, too.
Example
Using eCAL in your project to exchange data is simple. After you have downloaded eCAL and installed CMake, you are good to go.
Check out the Hello World example from the eCAL documentation for further details.
``` cpp #include <ecal/ecal.h> #include <ecal/msg/string/publisher.h>
#include
int main(int argc, char** argv) { // Initialize eCAL. The name of our process will be “Hello World Publisher” eCAL::Initialize(argc, argv, “Hello World Publisher”);
// Create a String Publisher that publishes on the topic “hello_world_topic” eCAL::string::CPublisher publisher(“hello_world_topic”);
// Infinite loop while (eCAL::Ok()) { // Publish a “Hello World” message publisher.Send(“Hello World”);
std::this_thread::sleep_for(std::chrono::milliseconds(500)); }
// finalize eCAL API eCAL::Finalize();
File truncated at 100 lines see the full file