
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
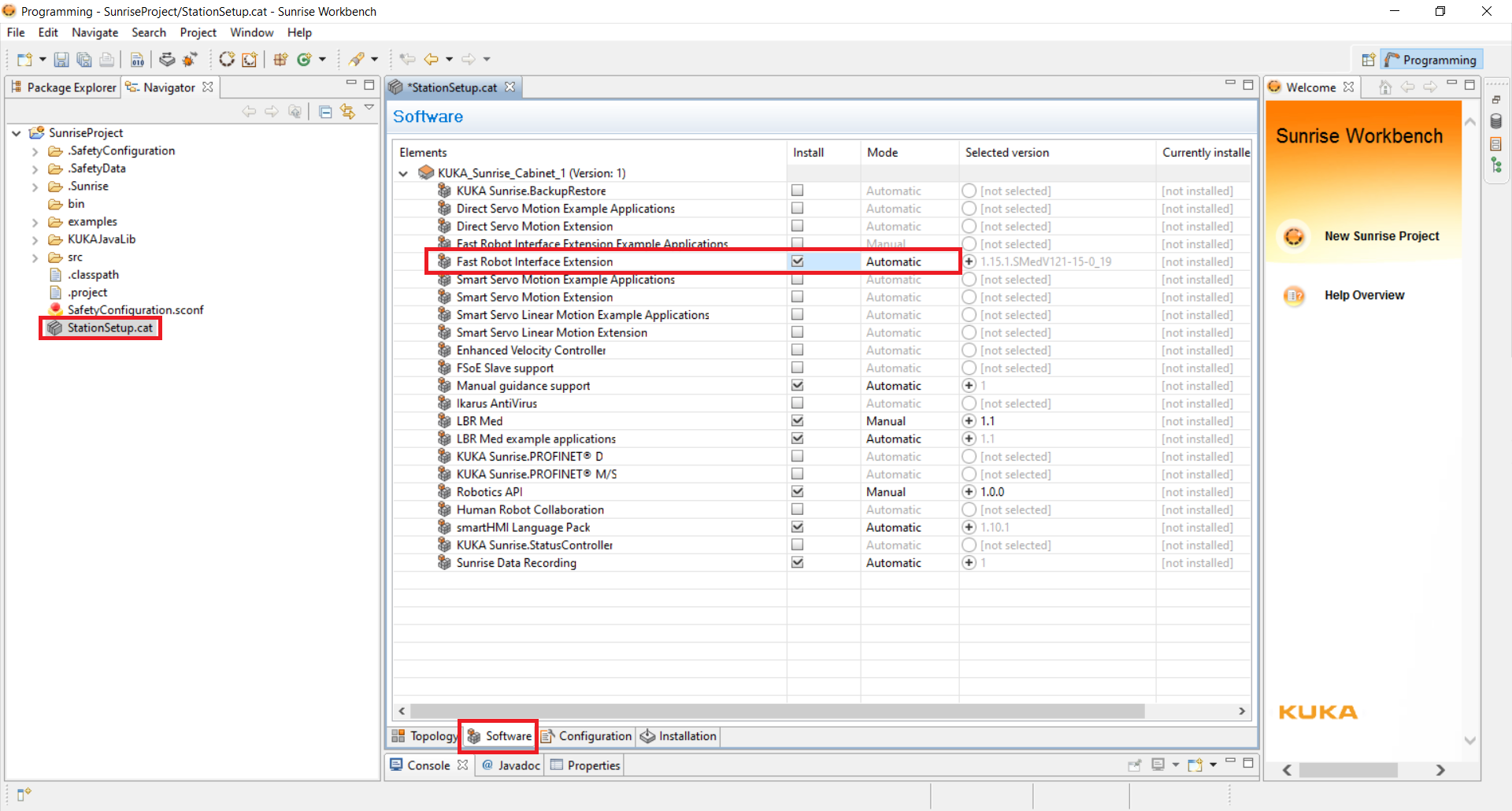
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
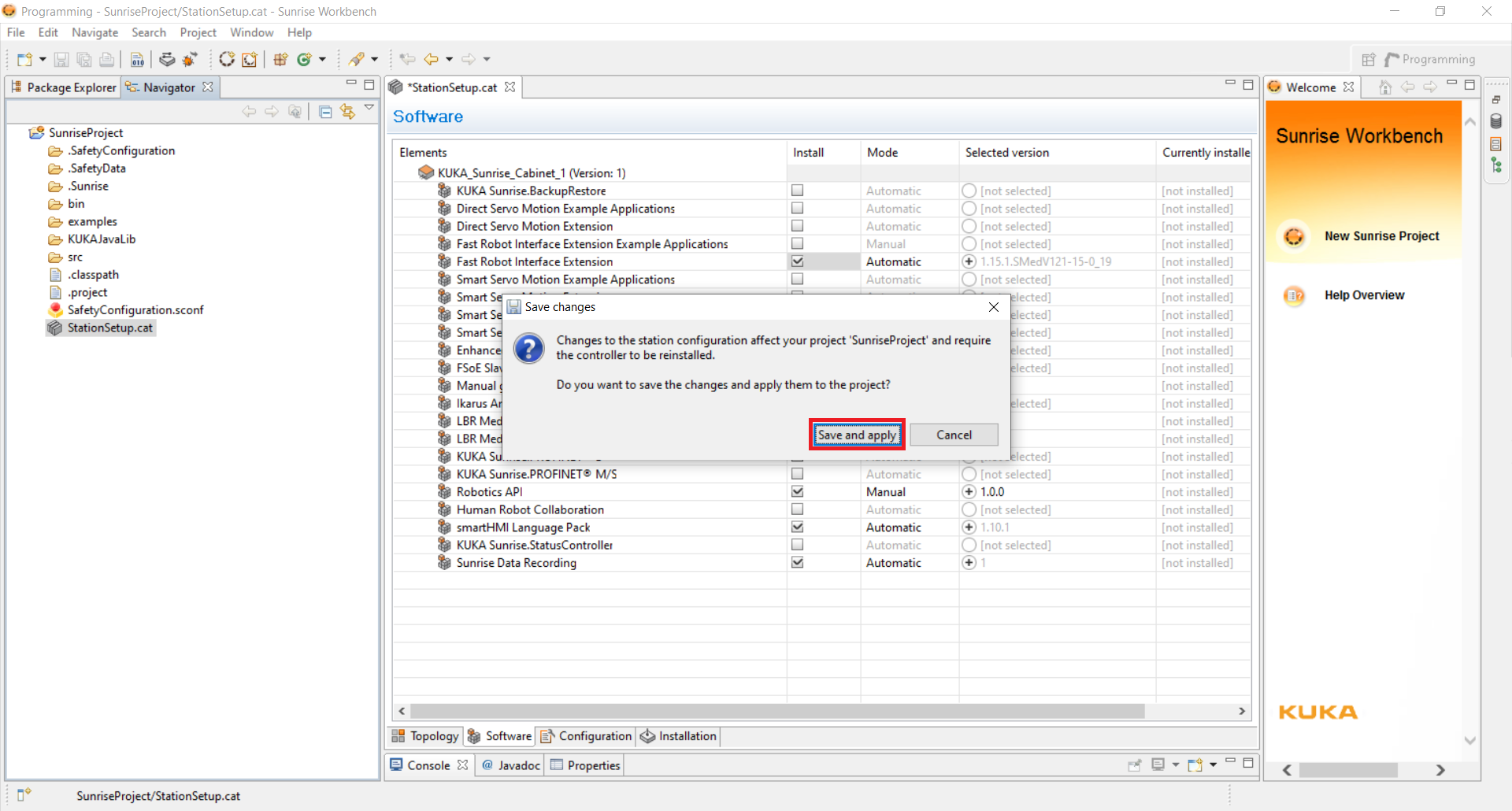
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
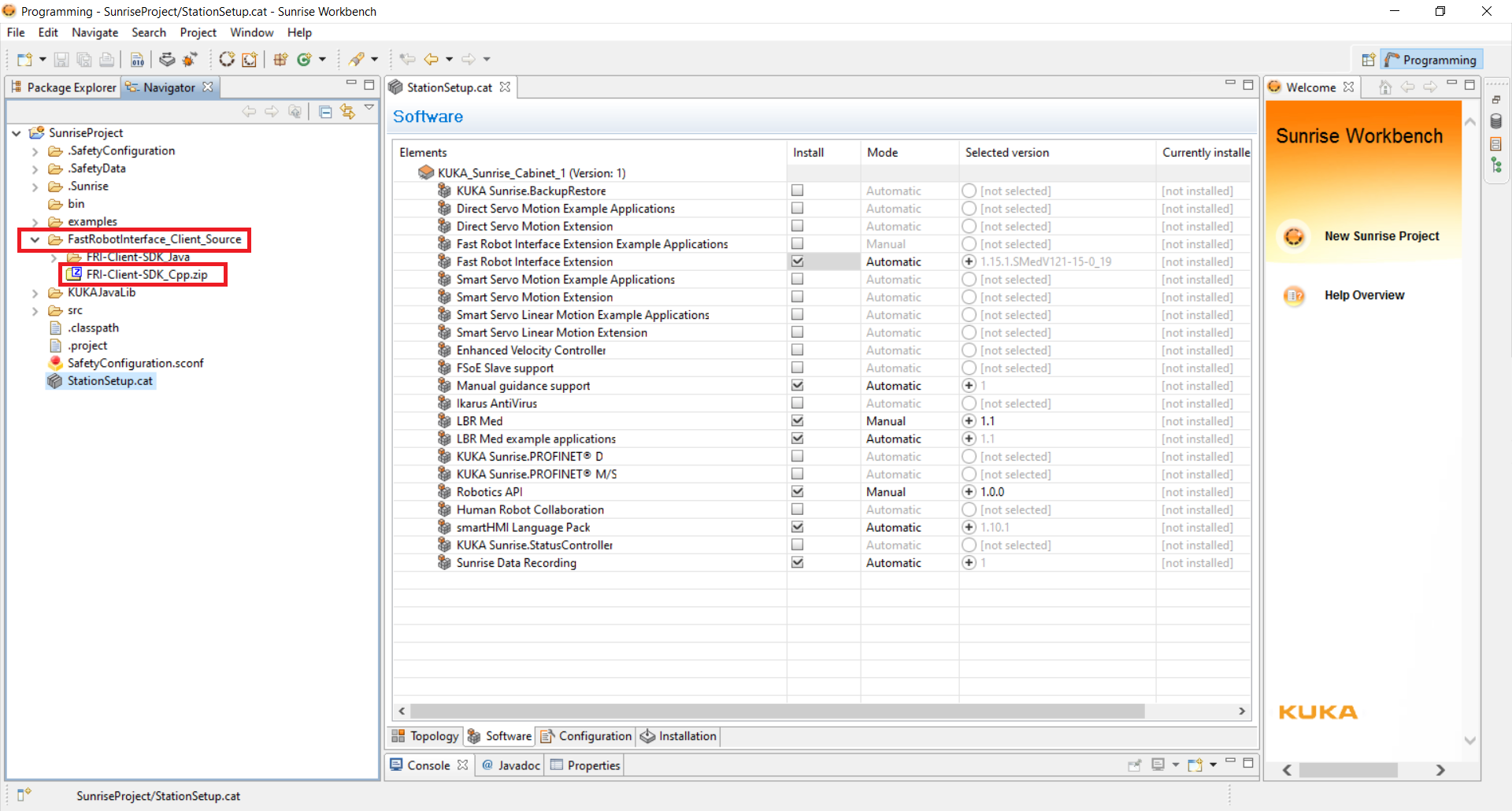
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fri_client_sdk at Robotics Stack Exchange
|
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fri_client_sdk at Robotics Stack Exchange
|
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fri_client_sdk at Robotics Stack Exchange
|
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fri_client_sdk at Robotics Stack Exchange
|
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fri_client_sdk at Robotics Stack Exchange
|
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fri_client_sdk at Robotics Stack Exchange
|
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fri_client_sdk at Robotics Stack Exchange
|
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fri_client_sdk at Robotics Stack Exchange
|
|
fri_client_sdk package from fri repofri_client_sdk |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache-2.0 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/lbr-stack/fri.git |
| VCS Type | git |
| VCS Version | fri-1.15 |
| Last Updated | 2025-11-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- bowangFromMars
- fredRocs
- liver121888
- peterMitrano
- mhubii
- OmidRezayof
Authors
fri
This folder adds CMake support to KUKA’s Fast Robot Interface (FRI).
| FRI Version | Build Status |
|---|---|
1.11 |
|
1.13 |
|
1.14 |
|
1.15 |
|
1.16 |
|
1.17 |
|
2.5 |
|
2.7 |
Build
To build, run
cmake -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_FRI_APPS=ON
cmake --build build
Run the Apps
To run the example applications, run
./build/LBRJointSineOverlayApp
On the smartPAD, run the LBRJointSineOverlay application. You should see the robot execute a sine wave.
Contributing
Do you use a different FRI version?
- Fork this repository.
- Replace
FRI-Client-SDK_Cpp.zipwith your client SDK as extracted fromKUKA Sunrise Workbench. Therefore (see images):- In the
Softwaretab ofStationSetup.cat, addFast Robot Interface Extension. - Save via
ctrl+s, clickSave and apply. - Under
FastRobotInterface_Client_Source, findFRI-Client-SDK_Cpp.zip.
- In the
- Open an issue and ask for a branch named fri-major.minor (e.g. fri-1.15).
- Open a pull request against this new branch.
License
Please note that we distribute the CMake support under Apache-2.0 license. Please note that third party libraries under FRI-Client-SDK_Cpp.zip are distributed under their respective license. See NOTICE.