
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
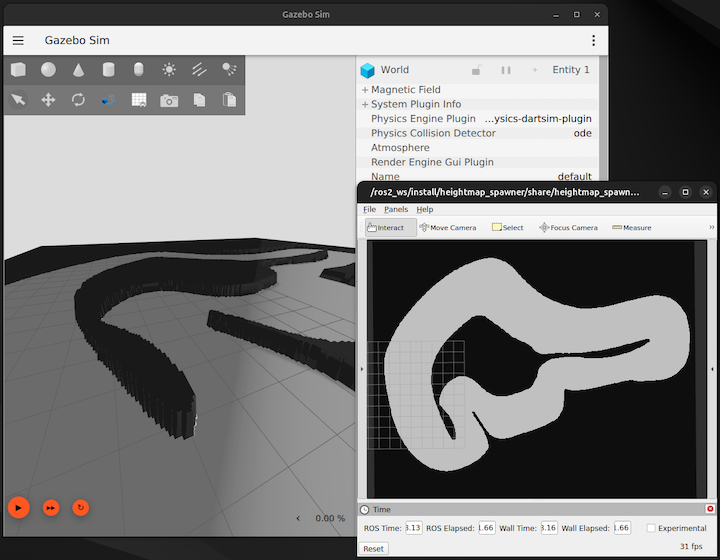
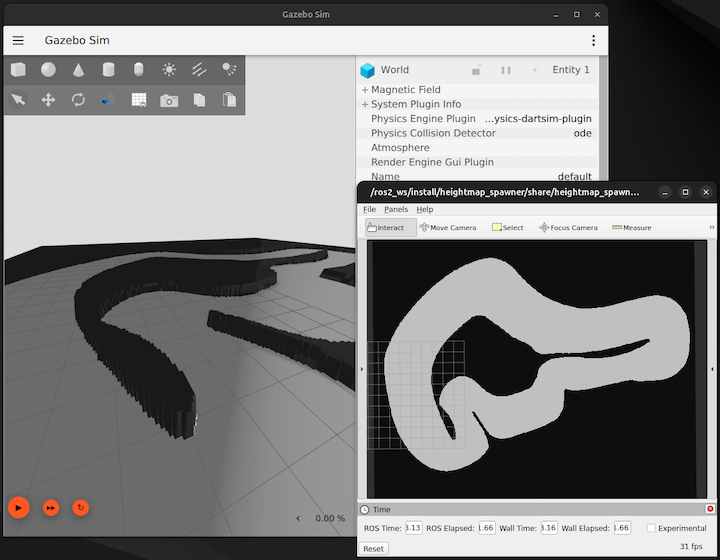
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| nav2_map_server | |
| nav2_lifecycle_manager |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged heightmap_spawner at Robotics Stack Exchange
|
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| gz_transport_vendor | |
| nav2_map_server | |
| nav2_lifecycle_manager |
System Dependencies
| Name |
|---|
| pkg-config |
| libopencv-dev |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged heightmap_spawner at Robotics Stack Exchange
|
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| nav2_map_server | |
| nav2_lifecycle_manager |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged heightmap_spawner at Robotics Stack Exchange
|
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| nav2_map_server | |
| nav2_lifecycle_manager |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged heightmap_spawner at Robotics Stack Exchange
|
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| nav2_map_server | |
| nav2_lifecycle_manager |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged heightmap_spawner at Robotics Stack Exchange
|
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| nav2_map_server | |
| nav2_lifecycle_manager |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged heightmap_spawner at Robotics Stack Exchange
|
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| nav2_map_server | |
| nav2_lifecycle_manager |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged heightmap_spawner at Robotics Stack Exchange
|
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| nav2_map_server | |
| nav2_lifecycle_manager |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged heightmap_spawner at Robotics Stack Exchange
|
|
heightmap_spawner package from heightmap_spawner repoheightmap_spawner |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/damanikjosh/heightmap_spawner.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-01-30 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Joshua J. Damanik
Authors
heightmap_spawner
A ROS 2 package that converts occupancy grids from nav2_map_server into 3D heightmap models for use in Gazebo simulations.
Features
- Occupancy Grid Conversion: Converts 2D occupancy grid maps into heightmaps for 3D simulation.
- Image Processing: Includes median filtering and color inversion to improve map accuracy.
- Configurable Thresholds: Adjustable parameters to control the image-to-heightmap transformation.
- Gazebo Integration: Automatically spawns the processed heightmap in Gazebo (gz-sim).
Dependencies
- ROS 2: Required for running the package in a ROS environment.
- Gazebo (gz-sim): The simulation platform where the heightmap models are spawned.
- Gazebo Transport Library (gz-transport): Facilitates communication with Gazebo.
- OpenCV: Used for image processing tasks such as filtering and color inversion.
- nav2_map_server: Provides the occupancy grid maps to be converted.
Installation
- Clone the repository into your ROS 2 workspace:
git clone https://github.com/damanikjosh/heightmap_spawner.git
- Install required dependencies using
rosdep:
rosdep install --from-paths src --ignore-src -r -y
- Build the workspace using
colcon:
colcon build
Usage
Launching the Example Map
Use the provided launch file to run the example map and see the heightmap spawner in action:
ros2 launch heightmap_spawner example.launch.py
Launching the Spawner Node
You can also launch the heightmap_spawner node directly using the spawner.launch.py file or by defining the node in your own launch files.
Node Arguments
Customize the behavior of the heightmap spawner using the following arguments:
| Argument | Default Value | Description |
|---|---|---|
save_path |
/tmp |
The directory where the processed heightmap image is saved. |
height |
0.5 |
The vertical height of the spawned heightmap in Gazebo. |
use_median_filtering |
true |
Enables median filtering to reduce noise in the heightmap. |
use_color_inverse |
true |
Inverts the colors of the image to adjust height scaling. |
low_thresh |
200 |
Lower threshold value for filtering the occupancy grid image. |
high_thresh |
255 |
Upper threshold value for filtering the occupancy grid image. |
License
This package is licensed under the MIT License. See the LICENSE.txt file for more details.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| rviz2 | |
| rclcpp | |
| std_msgs | |
| nav_msgs | |
| nav2_map_server | |
| nav2_lifecycle_manager |