
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.

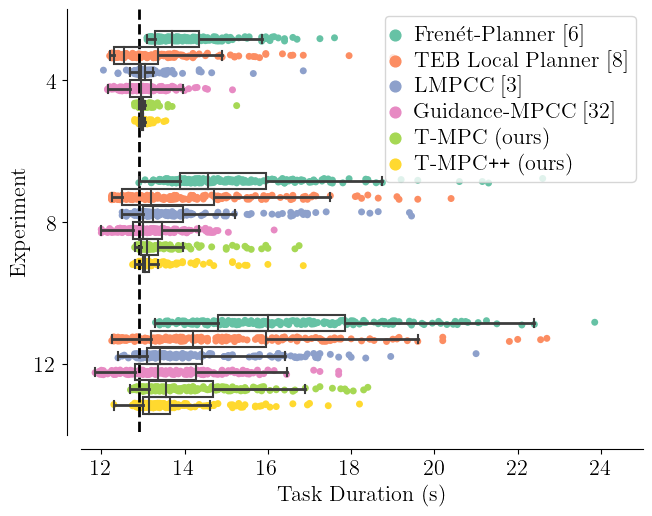
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
Services
Plugins
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
|
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
Services
Plugins
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
|
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
Services
Plugins
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
|
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
Services
Plugins
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
|
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
Services
Plugins
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
|
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
Services
Plugins
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
|
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
Services
Plugins
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
|
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
Services
Plugins
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
|
|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Oscar de Groot
Authors
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch