Package Summary
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
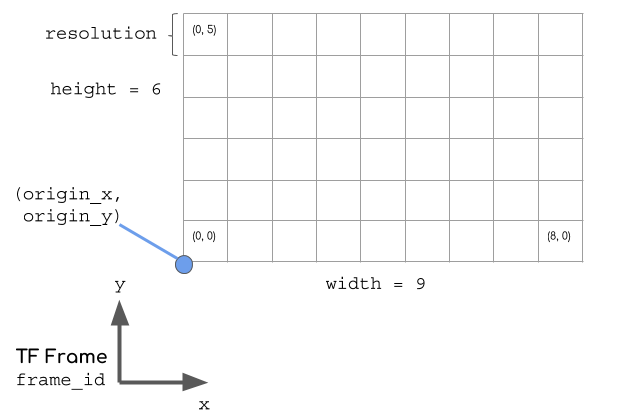
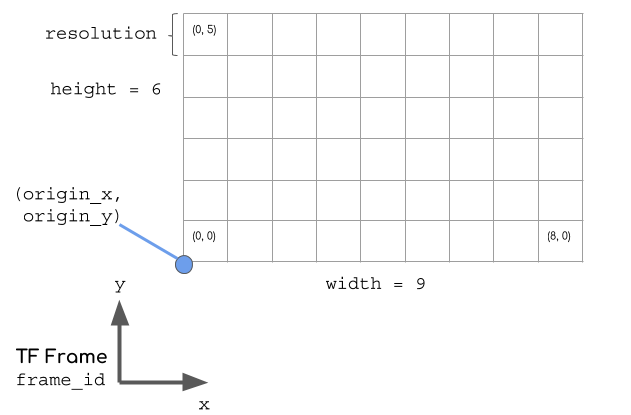
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
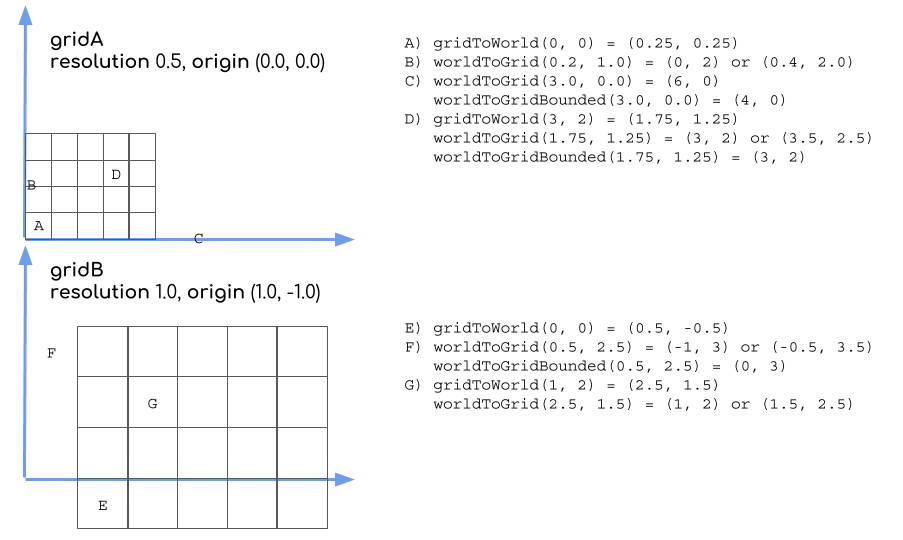
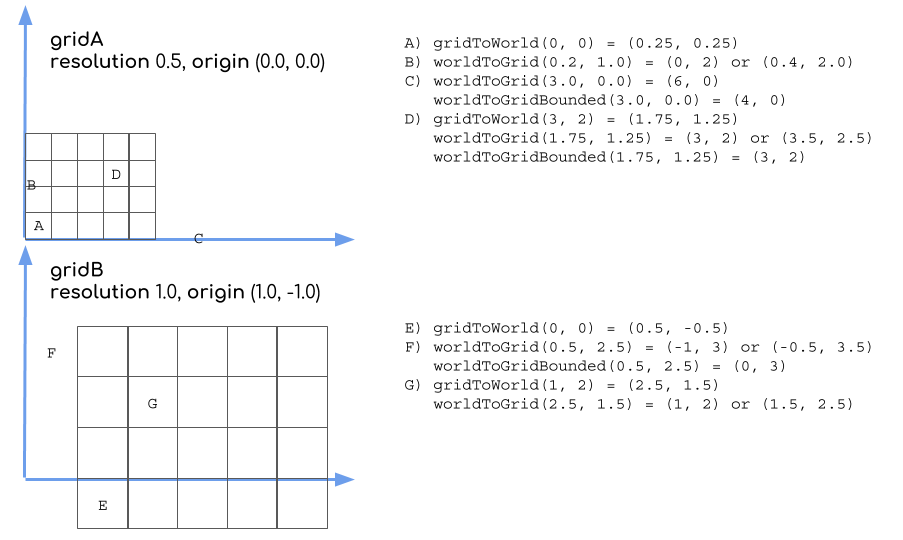
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
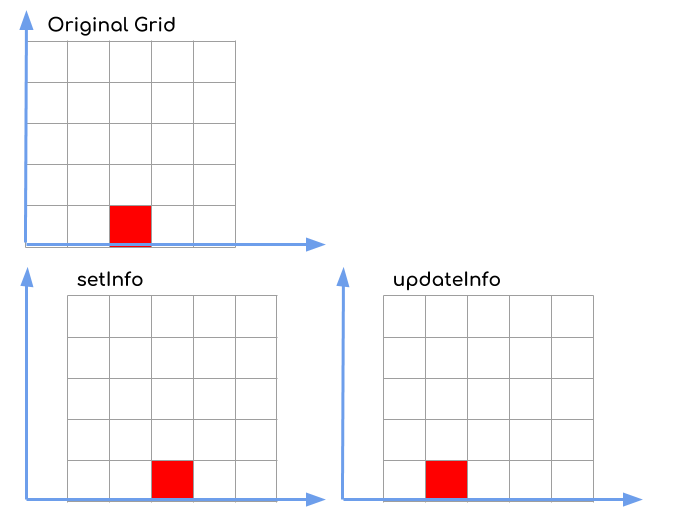
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.
Launch files
Messages
Services
Plugins
Recent questions tagged nav_grid at Robotics Stack Exchange
Package Summary
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
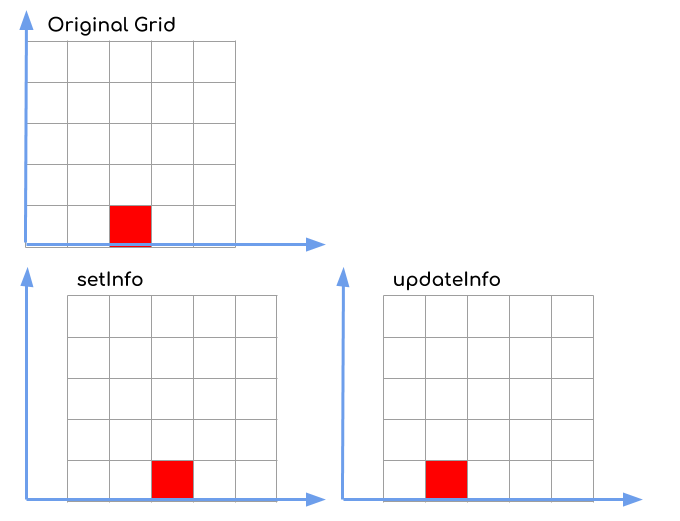
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.
Launch files
Messages
Services
Plugins
Recent questions tagged nav_grid at Robotics Stack Exchange
Package Summary
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.
Launch files
Messages
Services
Plugins
Recent questions tagged nav_grid at Robotics Stack Exchange
Package Summary
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.
Launch files
Messages
Services
Plugins
Recent questions tagged nav_grid at Robotics Stack Exchange
Package Summary
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.
Launch files
Messages
Services
Plugins
Recent questions tagged nav_grid at Robotics Stack Exchange
Package Summary
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.
Launch files
Messages
Services
Plugins
Recent questions tagged nav_grid at Robotics Stack Exchange
Package Summary
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.
Launch files
Messages
Services
Plugins
Recent questions tagged nav_grid at Robotics Stack Exchange
Package Summary
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.
Launch files
Messages
Services
Plugins
Recent questions tagged nav_grid at Robotics Stack Exchange
Package Summary
| Version | 0.3.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2025-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David V. Lu!!
Authors
nav_grid
Many navigation algorithms rely on the concept of a two dimensional grid being overlaid on the world, with a value being assigned to each grid cell. In the original navigation stack, Costmap2DROS associated an unsigned char with grid cells, global planners cache distance to the goal as floats and local planners would cache various metrics in a grid to quickly calculate the strength of different trajectories.
NavGridInfo
Where the grid exists in the world is defined by six parameters.
-
widthandheight(which together define the number of cells in the grid) -
resolutionwhich is the dimension of each cell in meters (square cells only) -
frame_idwhich is the TF frame the grid is defined relative to. -
origin_xandorigin_ywhich define the offset in meters from the root of the TF frame to the minimum corner of the (0, 0) cell.
Together, these components make a nav_grid::NavGridInfo struct. It evolved from the nav_msgs::MapMetaData message but without map_load_time, simplified origin geometry and the frame_id added. Note: for general efficiency of computation (particularly moving the grid while retaining some of the values) there is no rotation component to the origin. Each grid is locked to the orientation of its TF frame.
The default values are width=0, height=0, resolution=1.0, frame_id="map", origin_x=0.0, origin_y=0.0.
Coordinate Conversion
One of the most common operations is to want to convert between the real world coordinates and the grid coordinates. These operations can be done with a NavGridInfo object and the methods in coordinate_conversion.h. They are derived from methods in costmap_2d.h, but with some key differences (beyond replacing map with grid).
-
gridToWorldis the same asmapToWorld, as both return the world coordinates of the center of the specified cell. -
worldToGridworks likeworldToMapNoBounds, but it results in eitherintordoublecoordinates depending on the output parameter types. As the result are not bounded by the grid, the results are signed. -
worldToGridBoundedis a combination ofworldToMapandworldToMapEnforceBounds. It returns a bool for whether the input coordinates are within the grid AND the output coordinates are forced to be within the grid. The output coordinates are thereforeunsigned int. - There’s also
isWithinGridthat returns whether a given point is within the grid (i.e. will match the return value ofworldToGridBoundedbut saves some of the computation associated with calculating the actual values of the coordinates.
NavGrid<T>
Of course, we also want to associate a value with each cell in the grid. For that, we define the templatized nav_grid::NavGrid<T> abstract class. The template allows for storing arbitrary data types associated with each grid cell. The actual storage mechanism for the data is not part of the base class to allow for possibly more efficient methods. A default implementation where the data is simply stored in row-major order in a one-dimensional vector is provided in nav_grid::VectorNavGrid<T>
The constructor for NavGrid takes a default value for each cell which is 0 by default. The grid’s initial info matches the default info above, so the grid is initially 0x0.
The NavGrid class provides handy methods for accessing values via their grid indexes. You can use grid(x, y) or grid.getValue(x, y) to access each value, and use grid.setValue(x, y, value) to write each value. There is also the helper class nav_grid::Index that can be used to store the two coordinates and used in accessing the data as well a la grid(index) and grid.setValue(index, value).
There are two methods for changing the info associated with the grid: setInfo and updateInfo. setInfo changes the info while maintaining the data associated with each grid coordinate. updateInfo will change the info but instead maintain the data associated with the world coordinates.
For instance, imagine a 5x5 grid with 0.5 meter resolution with the cell (2, 0) set to red which represents a cell at (1.25, 0.25) in the world. If we change the origin to be 0.5 meters to the right, the grids will have different values according to the method we use. With setInfo, cell (2, 0) is still red, but it is associated with a cell at (1.75, 0.25) in the world. With updateInfo, the cell at (1.25, 0.25) is still red, but it is now associated with cell (1, 0). The exact mechanism for how this data is preserved is left to the implementing class.