
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
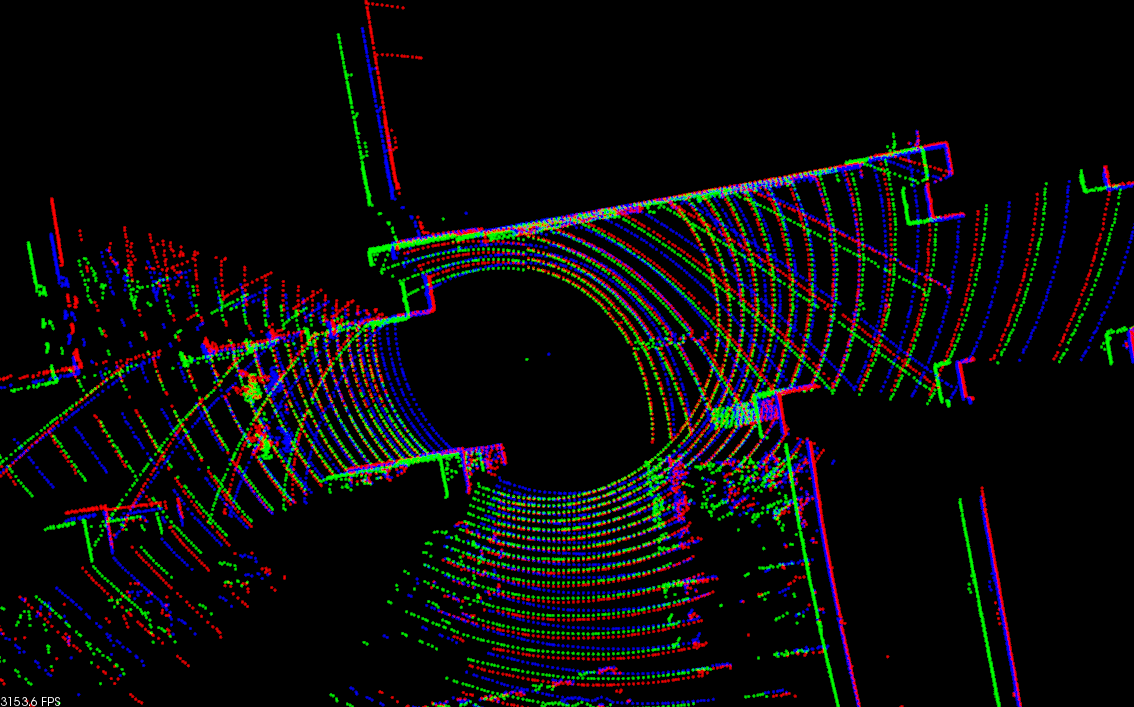
Red: target, Green: source, Blue: aligned
Launch files
Messages
Services
Plugins
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
|
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
Red: target, Green: source, Blue: aligned
Launch files
Messages
Services
Plugins
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
|
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
Red: target, Green: source, Blue: aligned
Launch files
Messages
Services
Plugins
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
|
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
Red: target, Green: source, Blue: aligned
Launch files
Messages
Services
Plugins
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
|
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
Red: target, Green: source, Blue: aligned
Launch files
Messages
Services
Plugins
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
|
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
Red: target, Green: source, Blue: aligned
Launch files
Messages
Services
Plugins
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
|
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
Red: target, Green: source, Blue: aligned
Launch files
Messages
Services
Plugins
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
|
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
Red: target, Green: source, Blue: aligned
Launch files
Messages
Services
Plugins
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
|
|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- koide
Authors
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
Red: target, Green: source, Blue: aligned