
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
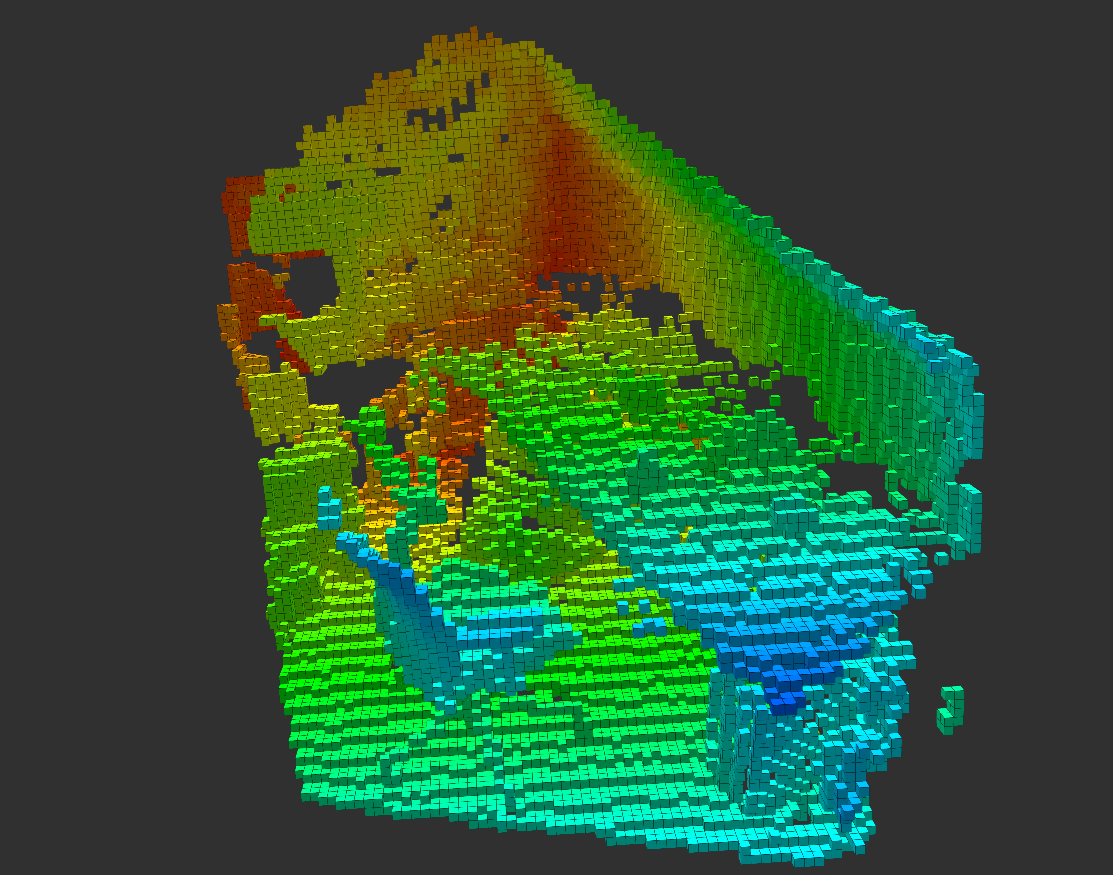
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged octomap_depth_mapping at Robotics Stack Exchange
|
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged octomap_depth_mapping at Robotics Stack Exchange
|
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged octomap_depth_mapping at Robotics Stack Exchange
|
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged octomap_depth_mapping at Robotics Stack Exchange
|
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged octomap_depth_mapping at Robotics Stack Exchange
|
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged octomap_depth_mapping at Robotics Stack Exchange
|
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged octomap_depth_mapping at Robotics Stack Exchange
|
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged octomap_depth_mapping at Robotics Stack Exchange
|
|
octomap_depth_mapping package from ros2-octomap-depth-mapping repooctomap_depth_mapping |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | GPL version 3.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/berkealgul/ros2-octomap-depth-mapping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- berke
Authors
Octomap Depth Mapping for ROS2
octomap_depth_mapping is a ROS2 package to create octomaps from depth images
Dependencies
- ROS2 Foxy or above
- Octomap
- OpenCV
- cv_bridge
- message_filters
- CUDA Toolkit (optional, for details)
Usage
You can clone this repository into your <your-ros2-workspace>/src folder and build the workspace
git clone https://github.com/berkealgul/ros2-octomap-depth-mapping.git
Before building this package, decide cuda usage and change your distance function if necessary
To launch the package (dont forget to source the package)
ros2 launch octomap_depth_mapping mapping_launch.py
Node: octodm_node
Main mapping and publishing node
Published Topics
|Name|Type|Description|
|:—:|:—:|—|
|octomap_fullmap| octomap_msgs/Octomap | generated octomap (orginated at 0,0,0) |
Subscribed Topics
|Name|Type|Description|
|:—:|:—:|—|
|depth/rect | sensor_msgs/Image | rectified depth image see here for details |
| pose | geometry_msgs/PoseStamped | pose of the camera relative to world origin |
Parameters
|Name|Default|Type|Description|
|:—:|:—:|:—:|—|
|sensor_model/fx | 524.0 | double | Camera fx calibration value |
|sensor_model/fy | 524.0 | double | Camera fy calibration value |
|sensor_model/cx | 316.8 | double | Camera cx calibration value |
|sensor_model/cy | 238.5 | double | Camera cy calibration value |
|sensor_model/hit | 0.7 | double | Hit probability of octomap |
|sensor_model/miss| 0.4 | double | Miss probability of octomap |
|sensor_model/min | 0.12 | double | Minimum probability of empty cell |
|sensor_model/max | 0.97 | double | Maximum probability of occupied cell |
|encoding | mono16 | string | Input image encoding |
|resolution | 0.05 | double | Octomap resolution |
|padding | 1 | int | Padding size between pixel during image projection |
|width | 640 | int | Input image width |
|height | 480 | int | Input image height |
|frame_id | map | string | Octomap ROS frame id |
|filename | | string | file path for saving & loading octomap (optional) |
|save_on_shutdown | false | bool | If true octomap is saved to filename before shutting down |
Remappings
|Name|Default|Description|
|:—:|:—:|—|
|image_in | depth/rect | Subscribed image topic |
|pose_in | pose | Subscribed camera pose topic |
|map_out | octomap_fullmap | Published octomap topic |
Services
|Name|Type|Description|
|:—:|:—:|—|
|reset | std_srvs/srv/Empty | Deletes octomap nodes |
|save | std_srvs/srv/Empty | Saves octomap into filename location|
|get_octomap | octomap_msgs/srv/GetOctomap | Returns current state of octomap |
About Image Data
This package supports 8 and 16 bit greyscale images
CV_U8C1 and CV_16UC1 in OpenCV literature
mono8 and mono16 in cv_bridge literature
In addition, images are assumed to be rectified beforehand; thus no distortion parameters are needed for this package
Cuda
By default cuda is not supported. In order to compile with cuda, uncomment line at CMakeLists.txt
# uncomment this line to use cuda
#set(USE_CUDA TRUE)
This package developed with cuda toolkit 11.4 and supports with gpu compute capabilities 3.5 and above
To learn more about cuda device compatibility look at this link
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |