
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
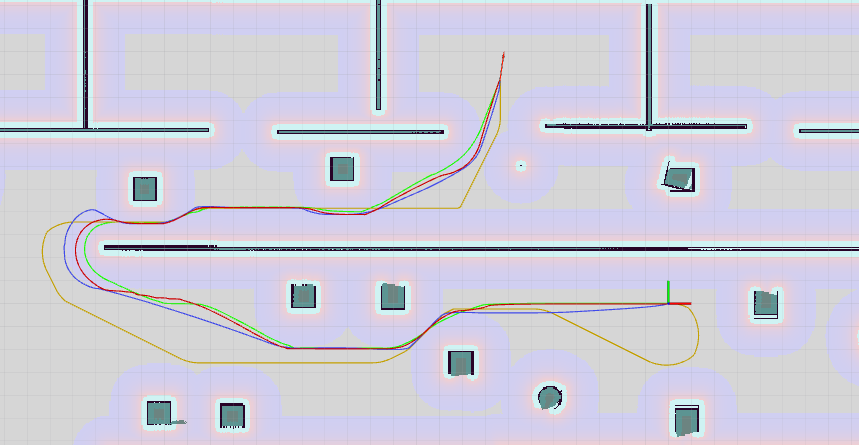
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time

Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]
Messages
Services
Plugins
Recent questions tagged planner_benchmark at Robotics Stack Exchange
|
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]
Messages
Services
Plugins
Recent questions tagged planner_benchmark at Robotics Stack Exchange
|
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]
Messages
Services
Plugins
Recent questions tagged planner_benchmark at Robotics Stack Exchange
|
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]
Messages
Services
Plugins
Recent questions tagged planner_benchmark at Robotics Stack Exchange
|
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]
Messages
Services
Plugins
Recent questions tagged planner_benchmark at Robotics Stack Exchange
|
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]
Messages
Services
Plugins
Recent questions tagged planner_benchmark at Robotics Stack Exchange
|
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]
Messages
Services
Plugins
Recent questions tagged planner_benchmark at Robotics Stack Exchange
|
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]
Messages
Services
Plugins
Recent questions tagged planner_benchmark at Robotics Stack Exchange
|
|
planner_benchmark package from global-planner-benchmark repoplanner_benchmark |
ROS Distro
|
Package Summary
| Version | 1.17.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ksvbka/global-planner-benchmark.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Trung Kien
Authors
- Trung Kien
ROS Global planner benchmark
Using for evaluate global planner
usage
roslaunch planner_benchmark benchmark.launch
- Set robot pose: Using “2D Pose Estimate” tool of Rviz
- Set goal: Using “2D Nav goal”
Add more planner by create new node in benchmark.lauch and config in param
Result
Path
Time
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/benchmark.launch
-
- map_file [default: $(find planner_benchmark)/maps/world4.yaml]