
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
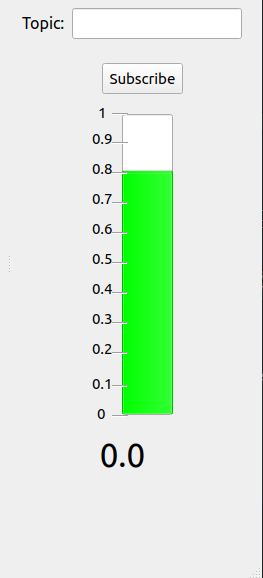
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
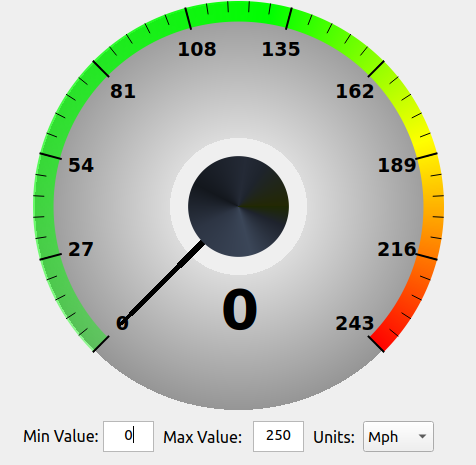
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
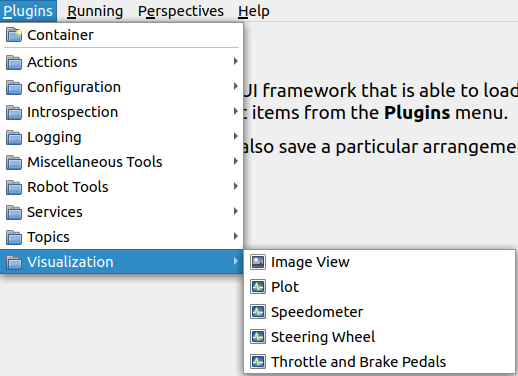
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
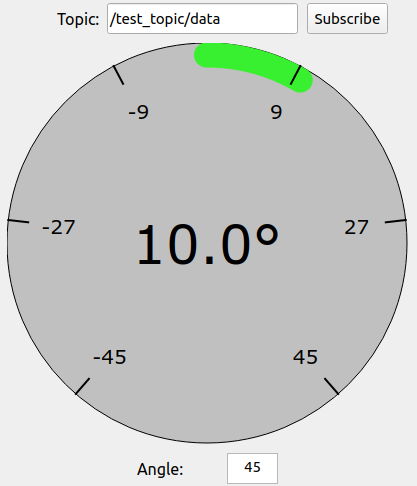
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_gauges at Robotics Stack Exchange
|
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_gauges at Robotics Stack Exchange
|
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_gauges at Robotics Stack Exchange
|
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_gauges at Robotics Stack Exchange
|
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_gauges at Robotics Stack Exchange
|
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_gauges at Robotics Stack Exchange
|
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_gauges at Robotics Stack Exchange
|
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_gauges at Robotics Stack Exchange
|
|
rqt_gauges package from rqt_gauges reporqt_gauges |
ROS Distro
|
Package Summary
| Version | 0.0.3 |
| License | BSD Clause 3 |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ToyotaResearchInstitute/gauges2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-14 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Eloy Bricneo
Authors
RQT gauges
rqt_gauges is and rqt Python plugin. It allows to create the different types of gauges:
- Dial
- Rotational
- Bar
| ROS2 Distro | Build Status | Package build |
|---|---|---|
| Rolling | ||
| Iron | ||
| Humble |
These widget are expected to be able to subscribe to a specific topic and select a field from that topic to show on the gauge UI. The following features are added to this widget:
- Show the value of the specified topic field
- Modify the minimum and maximum value of the gauge
- Modify the units of the dial
How to compile it
cd <workspace-with-the-package>
colcon build --packages-select rqt_gauges
source install/setup.bash
RQT
Run the RQT plugin UI:
rqt
Go to the following path on the menu tab: Plugins -> Visualization ->
Dial
Rotational
Bar
Standalone Plugin
Run the standalone node:
ros2 run rqt_gauges rqt_gauges
How to use it
Play by changing the minimum limit, maximum limit and units of the gauge with the boxes at the bottom of the widget. Subscribe to topics and watch the gauge move.
Create two different publishers: one with a geometry_msgs/msg/Twist and another one with std_msgs/msg/Int16:
In one terminal:
ros2 topic pub /test_topic_2 geometry_msgs/msg/Twist "linear:
x: 70.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
In another terminal:
ros2 topic pub /test_topic std_msgs/msg/Int16 "data: 10"
Go to the plugin and start filling the text box on top of it until you reach the specific field you want for a specific topic (there is a topic autocompleter in order to avoid any name issues):
Select the topic and completing the required field:
/test_topic/data
File truncated at 100 lines see the full file
Changelog for package rqt_gauges
0.0.3 (2024-03-14)
- Refactor using a base widget class (#35)
- Contributors: Carlos Agüero
0.0.2 (2024-02-20)
- Included build status (#34)
- Raname speedometer and steering wheel widgets (#33)
- Bar gauge (#32)
- Show raw values. (#31)
- Allow drag and drop from rqt_topic_monitor (#29) Co-authored-by: Carlos Agüero <<caguero@openrobotics.org>>
- Fixed crashes (#30)
- Steerirng Wheel widget truncated value (#28)
- Contributors: Alejandro Hernández Cordero, Carlos Agüero
0.0.1 (2024-01-09)
- Rename to rqt_gauges (#23)
- Fixed steering wheel range (#24)
- Fixed resize (#22)
- Fix some crashes (#21)
- utils.py to include common code and fixed merge (#20)
- Added xmllint and fleka8 (#19)
- Fixed runtime error (#12)
- Added documentation (#17)
- Setup CI (#16)
- Added .gitignore (#13)
- Creates the Steering Wheel Widget (#10) Co-authored-by: Franco Cipollone <<franco.c@ekumenlabs.com>>
- Creates the Throttle and Brake pedals Widget (#7)
- Creates the Speedometer Widget UI and Funtionality (#4)
- Makes the plugin package discoverable (#3)
- Creates a discoverable rqt plugin within the package (#2)
- Initial commit.
- Contributors: Alejandro Hernández Cordero, Eloy Briceno, Franco Cipollone
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| qt_gui | |
| qt_gui_py_common | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_flake8 | |
| ament_xmllint |