
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
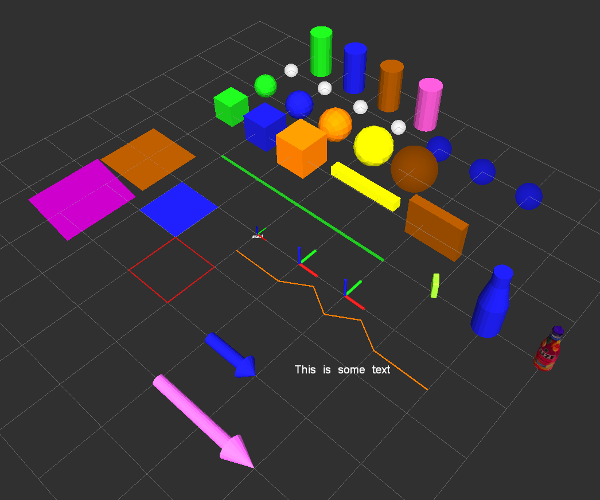
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_tools_py at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_tools_py at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_tools_py at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_tools_py at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_tools_py at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_tools_py at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_tools_py at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_tools_py at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/shinkansan/artiv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-12-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Butterworth
Authors
Rviz Tools for python
Some useful tools for using ROS Rviz with python.
Currently this package contains some functions that make it easy to publish Rviz Markers in a pythonic way.
Python code by David Butterworth.
Based on Dave Coleman’s C++ library RvizVisualTools
This package been tested on Ubuntu 14.04 with ROS Indigo.
Usage examples:
The normal way to publish an Rviz Marker is by setting its properties using ROS message types:
P = Pose(Point(0,0,0),Quaternion(0,0,0,1))
scale = Vector3(1.1,0.2,0.8)
markers.publishCube(P, 'red', scale)
Alternatively you can publish a Marker using a numpy matrix, with parameters specified as floats, tuples and lists:
T = transformations.translation_matrix((1,1,1))
rgb_color = [0,1,0]
cube_width = 0.5
markers.publishCube(T, rgb_color, cube_width)
Demo:
To run the example code:
$ rosrun rviz_tools_py demo.py
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| rospy | |
| visualization_msgs | |
| tf | |
| rospkg | |
| catkin |