
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
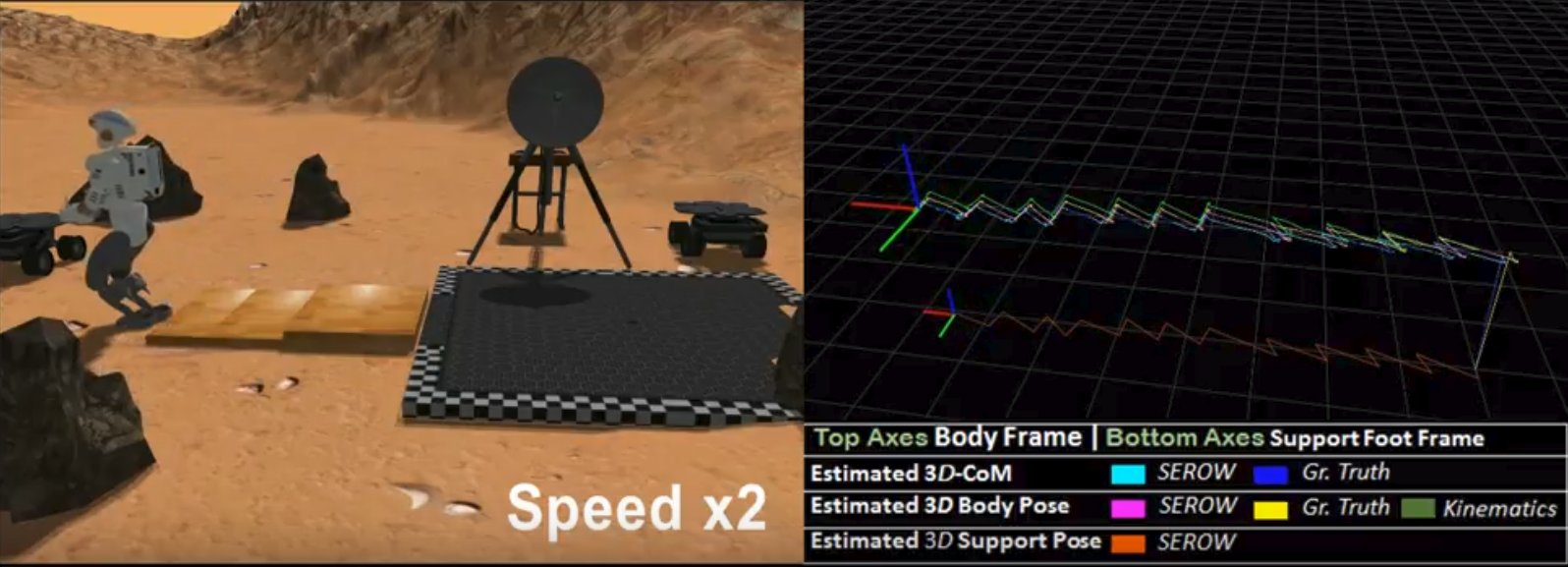
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
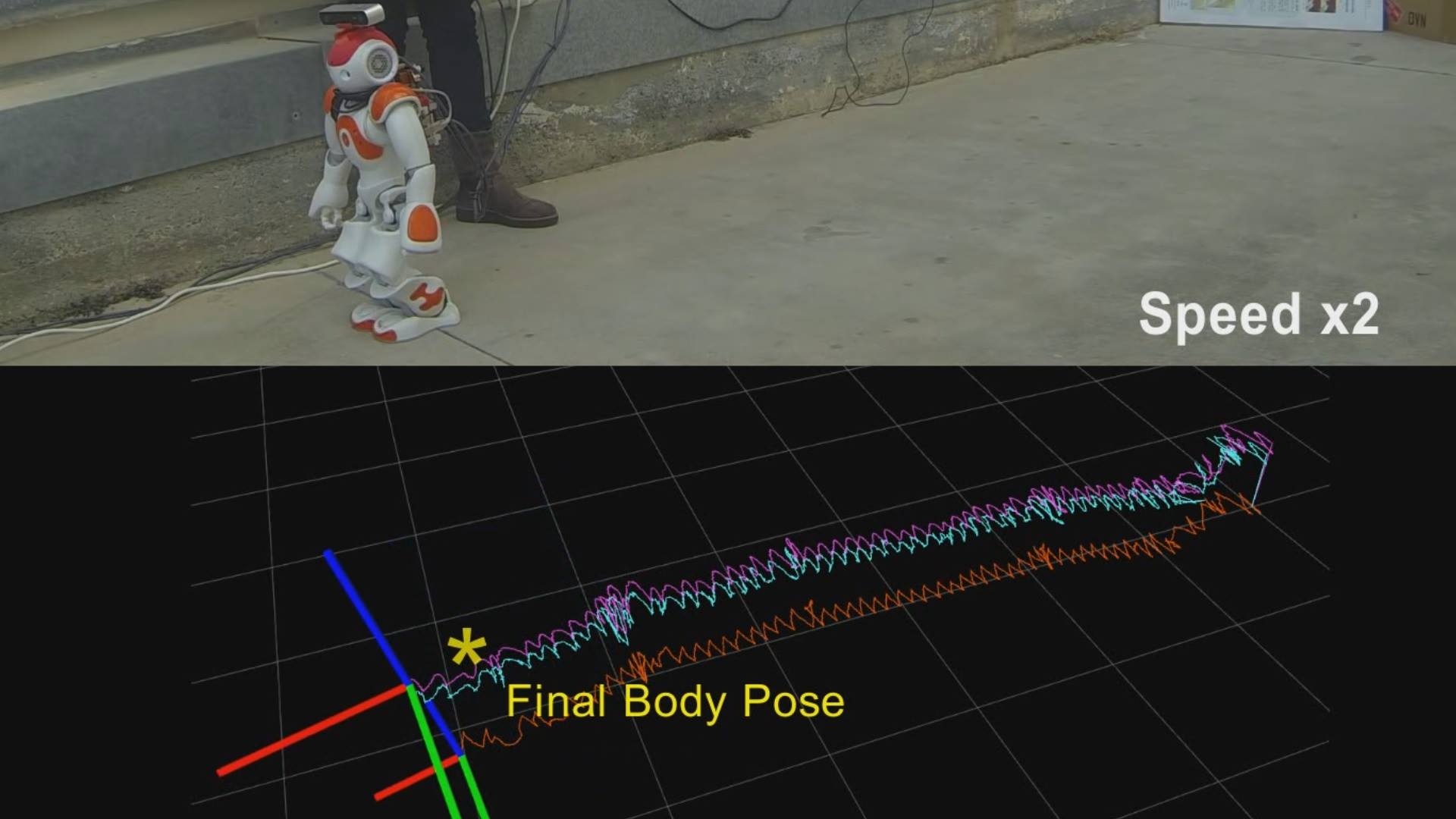
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged serow_ros at Robotics Stack Exchange
|
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged serow_ros at Robotics Stack Exchange
|
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged serow_ros at Robotics Stack Exchange
|
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged serow_ros at Robotics Stack Exchange
|
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged serow_ros at Robotics Stack Exchange
|
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged serow_ros at Robotics Stack Exchange
|
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged serow_ros at Robotics Stack Exchange
|
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged serow_ros at Robotics Stack Exchange
|
|
serow_ros package from serow reposerow_ros serow_ros2 |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
Getting Started (Legacy)
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
ROS Examples
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launch- hit space to unpause the rosbag play
NAO walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launch- hit space to unpause the rosbag play
License
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |