
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
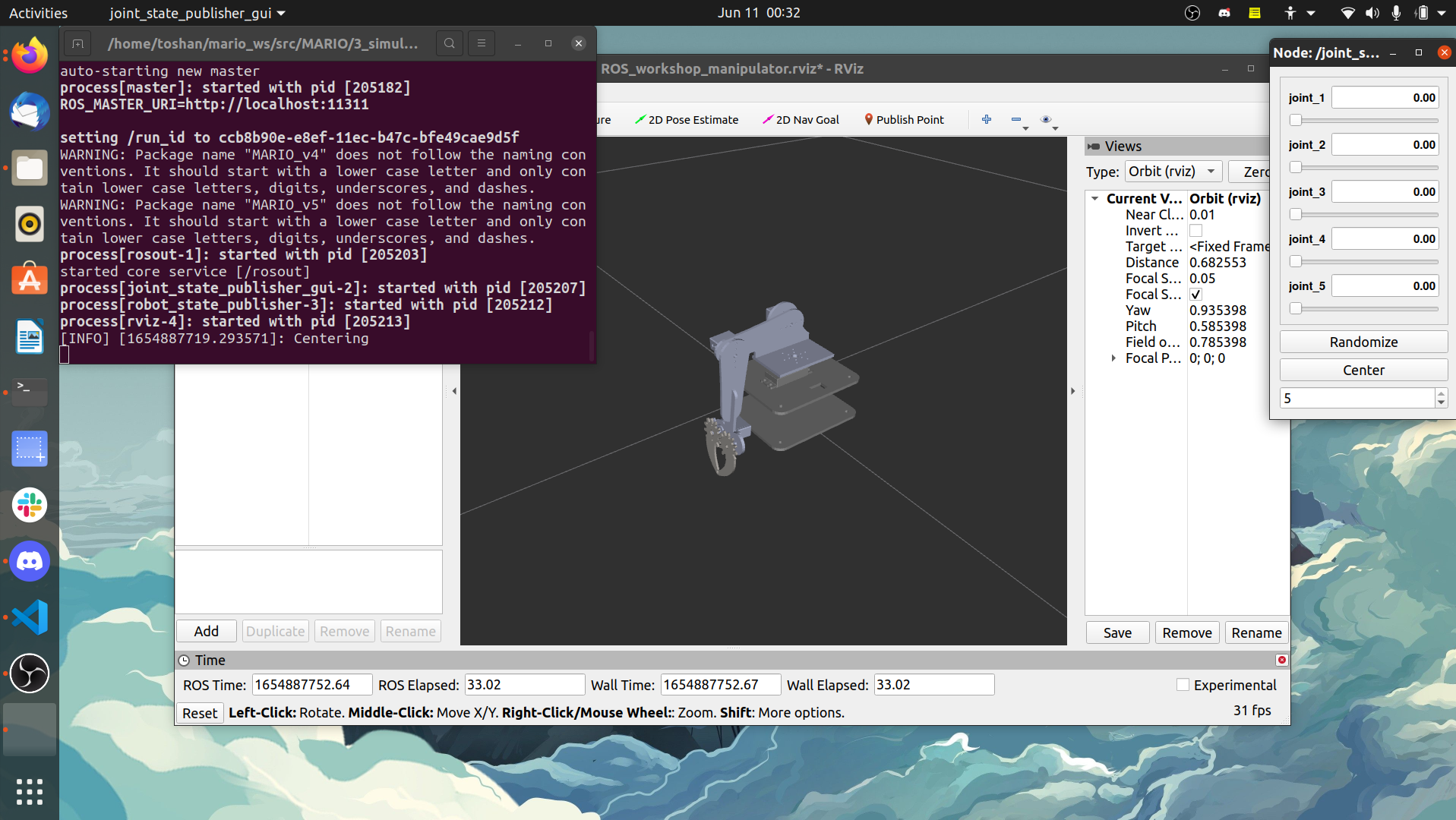
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged simulation_rviz at Robotics Stack Exchange
|
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged simulation_rviz at Robotics Stack Exchange
|
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged simulation_rviz at Robotics Stack Exchange
|
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged simulation_rviz at Robotics Stack Exchange
|
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged simulation_rviz at Robotics Stack Exchange
|
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged simulation_rviz at Robotics Stack Exchange
|
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged simulation_rviz at Robotics Stack Exchange
|
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged simulation_rviz at Robotics Stack Exchange
|
|
simulation_rviz package from mario repochatter_listener simulation_dh simulation_rviz simulation_gazebo circle |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/sra-vjti/mario.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-04-25 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- proto
Authors
Steps to run the demo in RViz
Introduction to RViz 2:
RViz 2 is a powerful 3D visualization tool provided by the Robot Operating System (ROS) 2 ecosystem. It serves as an essential component for roboticists, engineers, and researchers to visualize and interact with robot models, sensor data, and other important information in a simulated or real-world environment. RViz 2 offers a user-friendly interface with a wide range of features tailored to support the development, debugging, and testing of robotic systems.Here , along we can visualize the URDF of manipulator on Rviz using command line as well as GUI to give input.
If you have not installed the joint_state_publishers and ros_control for ros-noetic, follow the commands given here
- Remember : Whenever you are using ros commands in another terminal , make sure you source the ros commands:
source install/setup.bash
- Run the launch file
ros2 launch simulation_rviz display.launch.py
- If you come across this error Could not find the GUI, install the ‘joint_state_publisher_gui’ package
- Install using
sudo apt install ros-
-joint-state-publisher-gui - Install all the packages required in the same way if needed.
-
Once you are done with the visualisation with gui , Ctrl+ c to stop this .
-
For command line input
ros2 launch simulation_rviz rviz.launch.py
- To give input angles from command line
ros2 run simulation_rviz rviz.py
*you can use your this command to view the topics actively published . This will show if the values are published to the toppic we want to.
ros2 topic list
*To observe the published data in another terminal
ros2 topic echo
Then initially set all values to zero , to get the default position of the manipulator . After this you can now check for different values.
As you give the input in the terminal , you can observe how the manipulator moved according to your input values of angles between links.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| robot_state_publisher | |
| joint_state_publisher | |
| joint_state_publisher_gui | |
| rviz2 | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |