
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
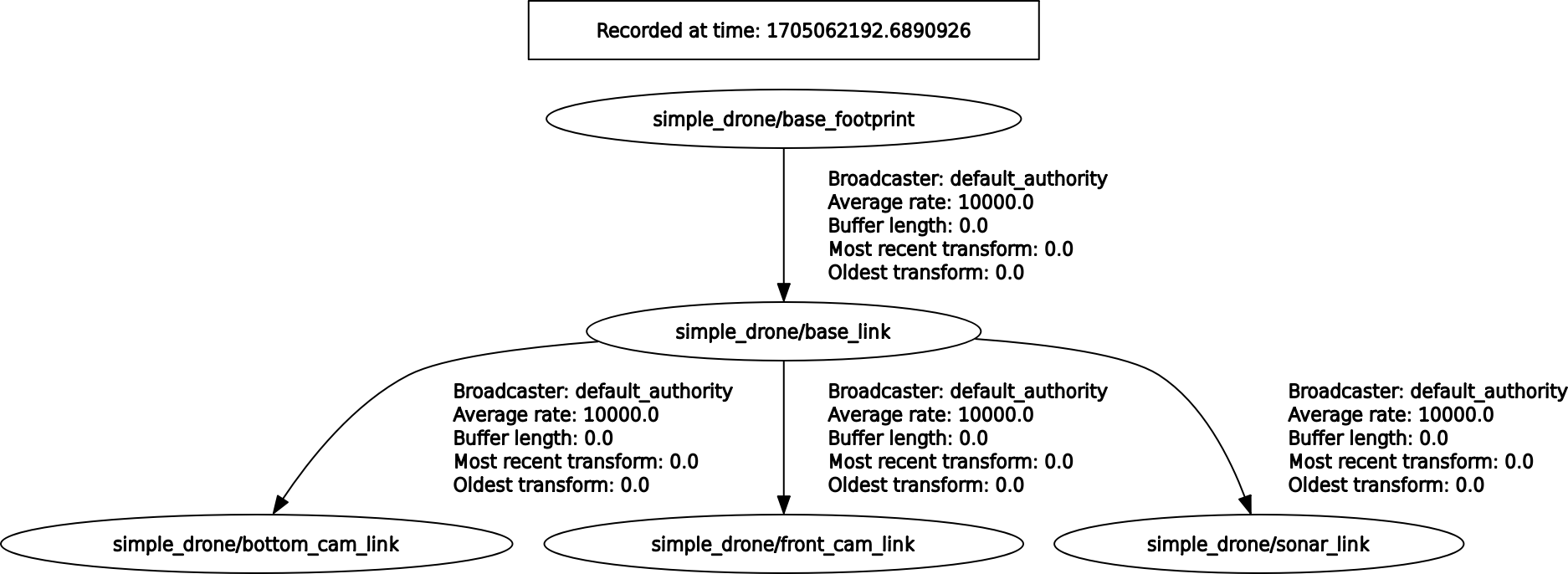
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sjtu_drone_description at Robotics Stack Exchange
|
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sjtu_drone_description at Robotics Stack Exchange
|
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sjtu_drone_description at Robotics Stack Exchange
|
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sjtu_drone_description at Robotics Stack Exchange
|
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sjtu_drone_description at Robotics Stack Exchange
|
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sjtu_drone_description at Robotics Stack Exchange
|
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sjtu_drone_description at Robotics Stack Exchange
|
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sjtu_drone_description at Robotics Stack Exchange
|
|
sjtu_drone_description package from sjtu_drone reposjtu_drone_bringup sjtu_drone_control sjtu_drone_description |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/novog93/sjtu_drone.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-02-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Georg Novotny
Authors
sjtu_drone_description
This package contains the xacro/urdf/sdf model description of the sjtu drone and the corresponding plugin for Gazebo 11 and ROS 2 Humble.
Structure
- models: Gazebo sdf model and model meshes
- include: Header files for the PID controller and drone plugin
- src: Source code for the drone plugin and PID controller
- urdf: Xacro and urdf model description files
- worlds: Contains one playground world
Worlds
To fully load the world you need to donwload the gazebo models first:
curl -L https://github.com/osrf/gazebo_models/archive/refs/heads/master.zip -o /tmp/gazebo_models.zip \
&& unzip /tmp/gazebo_models.zip -d /tmp && mkdir -p ~/.gazebo/models/ && mv /tmp/gazebo_models-master/* ~/.gazebo/models/ \
&& rm -r /tmp/gazebo_models.zip
TF Tree
Generate urdf and sdf files
To generate the urdf file run the following command:
ros2 run xacro xacro -o ./urdf/sjtu_drone.urdf ./urdf/sjtu_drone.urdf.xacro params_path:="$(ros2 pkg prefix sjtu_drone_bringup)/share/sjtu_drone_bringup/config/drone.yaml" # Generate urdf file, you need to change the mesh path to the gazebo model
To generate the sdf file run the following command:
gz sdf -p ./urdf/sjtu_drone.urdf > ./models/sjtu_drone/model.sdf # Generate sdf file, you need to change the mesh path to the gazebo model
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| gazebo_ros | |
| gazebo_plugins | |
| gazebo_dev | |
| geometry_msgs | |
| std_msgs | |
| sensor_msgs |