
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
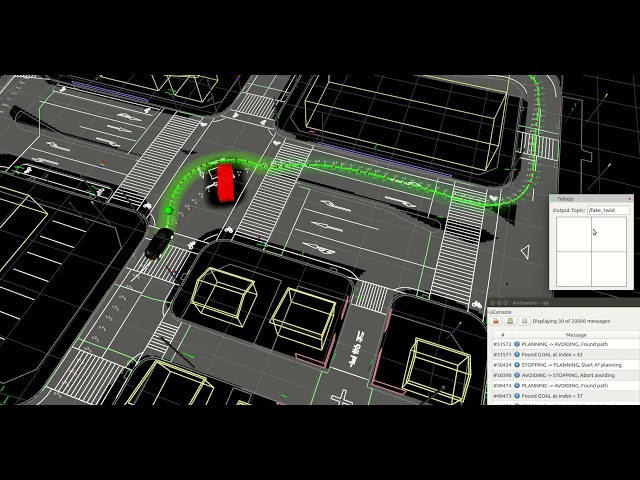
Dynamically avoiding (senario 1)
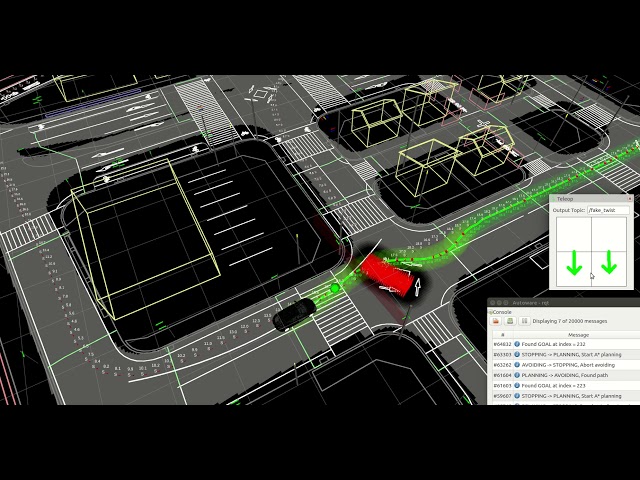
Dynamically avoiding (senario 2)
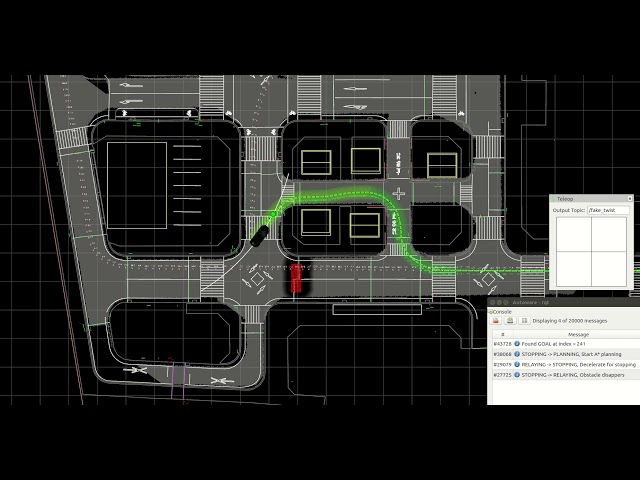
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]
Messages
Services
Plugins
Recent questions tagged waypoint_planner at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
Dynamically avoiding (senario 1)
Dynamically avoiding (senario 2)
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]
Messages
Services
Plugins
Recent questions tagged waypoint_planner at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
Dynamically avoiding (senario 1)
Dynamically avoiding (senario 2)
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]
Messages
Services
Plugins
Recent questions tagged waypoint_planner at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
Dynamically avoiding (senario 1)
Dynamically avoiding (senario 2)
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]
Messages
Services
Plugins
Recent questions tagged waypoint_planner at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
Dynamically avoiding (senario 1)
Dynamically avoiding (senario 2)
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]
Messages
Services
Plugins
Recent questions tagged waypoint_planner at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
Dynamically avoiding (senario 1)
Dynamically avoiding (senario 2)
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]
Messages
Services
Plugins
Recent questions tagged waypoint_planner at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
Dynamically avoiding (senario 1)
Dynamically avoiding (senario 2)
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]
Messages
Services
Plugins
Recent questions tagged waypoint_planner at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
Dynamically avoiding (senario 1)
Dynamically avoiding (senario 2)
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]
Messages
Services
Plugins
Recent questions tagged waypoint_planner at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito OHSATO
Authors
- Akihito OHSATO
- ando
Waypoint Planner
Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
Waypoint Planner - Astar Avoid
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it’s possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
How to launch
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Subscriptions/Publications
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Demo videos
Dynamically avoiding (senario 1)
Dynamically avoiding (senario 2)
Statically avoiding by big re-routing
Waypoint Planner - Velocity Set
// TODO
Changelog for package waypoint_planner
1.11.0 (2019-03-21)
- [Feature] Improve Hybrid A* planner
(#1594)
- Delete obstacle_sim from astar_planner package, replaced to lidar_fake_perception
- Modify package name, astar_planner -> waypoint_planner, and create astar_planner library package
- Delete obstacle_avoid/astar* and modify its dependency to astar_planner library
- Fix astar_navi with astar_planner library
- Refactor astar_navi by separating HAstar library and fixing coodinate system
- Rename obstacle_avoid -> astar_avoid and under refactoring
- Fix cost function and configures
- Fix backward search and refactor configurations
- Apply clang-format
- Refactor include
- Fix typo and so on
- Improve astar_avoid by incremental goal search
- Apply clang-format
- Revert package names
- Fix package/code names
- Update runtime_manager
- Improve astar_avoid to execute avoidance behavior by state transition (by rebuild decision maker)
- Fix PascalCase message names by #1408
- Remove obstacle_avoid directory
- Fix default parameter for costmap topic
- Fix warning and initialize condition
- Remove use_avoidance_state mode (TODO: after merging rebuild decision maker)
- Improve astar_avoid behavior by simple state transition and multi-threading
- Apply clang-format
- Fix replan_interval in astar_avoid
- Add descriptions for paramters
- Rename pkg name, astar_planner -> waypoint_planner
- Fix param name
- Fix avoid waypoints height
- Fix parameter and formalize code
- Add README for freespace/waypoint_planner
* Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Fix CHANGELOG Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>> Add License terms Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix astar_navi/README.md
- Add License terms
- Fix const pointer
- Added unit test base
- Restructured folders
- Fix bug by adding AstarSearch reset
* Fix WaveFrontNode initialization Co-Authored-By: aohsato <<aohsato@gmail.com>>
- Fix variable name
- Refactor threading
- Re-adding lidar_fake_perception
- Fix the condition to judge reaching goal
- Add 'use_decision state' mode to transit avoidance state by decision_maker
- Fix calcDiffOfRadian (if diff > 2pi)
- Feature/test astar planner (#1753)
- Restructured folders
- Added unit test base
- Removed remaining folder
- Test WIP
- Added astar_util tests and base file for astar_search tests
- Updated to ROS Cpp Style guidelines
- Added test for SimpleNode constructor
- Updated Copyright date
- Added tests for astar algorithm
- Added default constructor to WaveFront struct
- Revert use_state_decision mode (94af7b6)
- Fix costmap topic names by merging costmap_generator
- Contributors: Akihito Ohsato
1.10.0 (2019-01-17)
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool (#1704)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| lattice_planner |
Launch files
- launch/astar_avoid.launch
-
- safety_waypoints_size [default: 100]
- update_rate [default: 10]
- costmap_topic [default: semantics/costmap_generator/occupancy_grid]
- enable_avoidance [default: false]
- avoid_waypoints_velocity [default: 10.0]
- avoid_start_velocity [default: 3.0]
- replan_interval [default: 2.0]
- search_waypoints_size [default: 50]
- search_waypoints_delta [default: 2]
- closest_search_size [default: 30]
- use_back [default: false]
- use_potential_heuristic [default: true]
- use_wavefront_heuristic [default: false]
- time_limit [default: 1000.0]
- robot_length [default: 4.5]
- robot_width [default: 1.75]
- robot_base2back [default: 1.0]
- minimum_turning_radius [default: 6.0]
- theta_size [default: 48]
- curve_weight [default: 1.2]
- reverse_weight [default: 2.00]
- lateral_goal_range [default: 0.5]
- longitudinal_goal_range [default: 2.0]
- angle_goal_range [default: 6.0]
- obstacle_threshold [default: 100]
- potential_weight [default: 10.0]
- distance_heuristic_weight [default: 1.0]
- launch/velocity_set.launch
-
- update_rate [default: 10.0]
- use_crosswalk_detection [default: true]
- enable_multiple_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_lanelet2.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- launch/velocity_set_option.launch
-
- use_crosswalk_detection [default: true]
- points_topic [default: points_no_ground]
- velocity_offset [default: 1.2]
- decelerate_vel_min [default: 1.3]
- remove_points_upto [default: 2.3]
- enable_multiple_crosswalk_detection [default: true]
- stop_distance_obstacle [default: 10.0]
- stop_distance_stopline [default: 5.0]
- detection_range [default: 1.3]
- points_threshold [default: 10]
- detection_height_top [default: 0.2]
- detection_height_bottom [default: -1.7]
- deceleration_obstacle [default: 0.8]
- deceleration_stopline [default: 0.6]
- velocity_change_limit [default: 9.972]
- deceleration_range [default: 0]
- temporal_waypoints_size [default: 100]
- use_ll2 [default: false]