
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
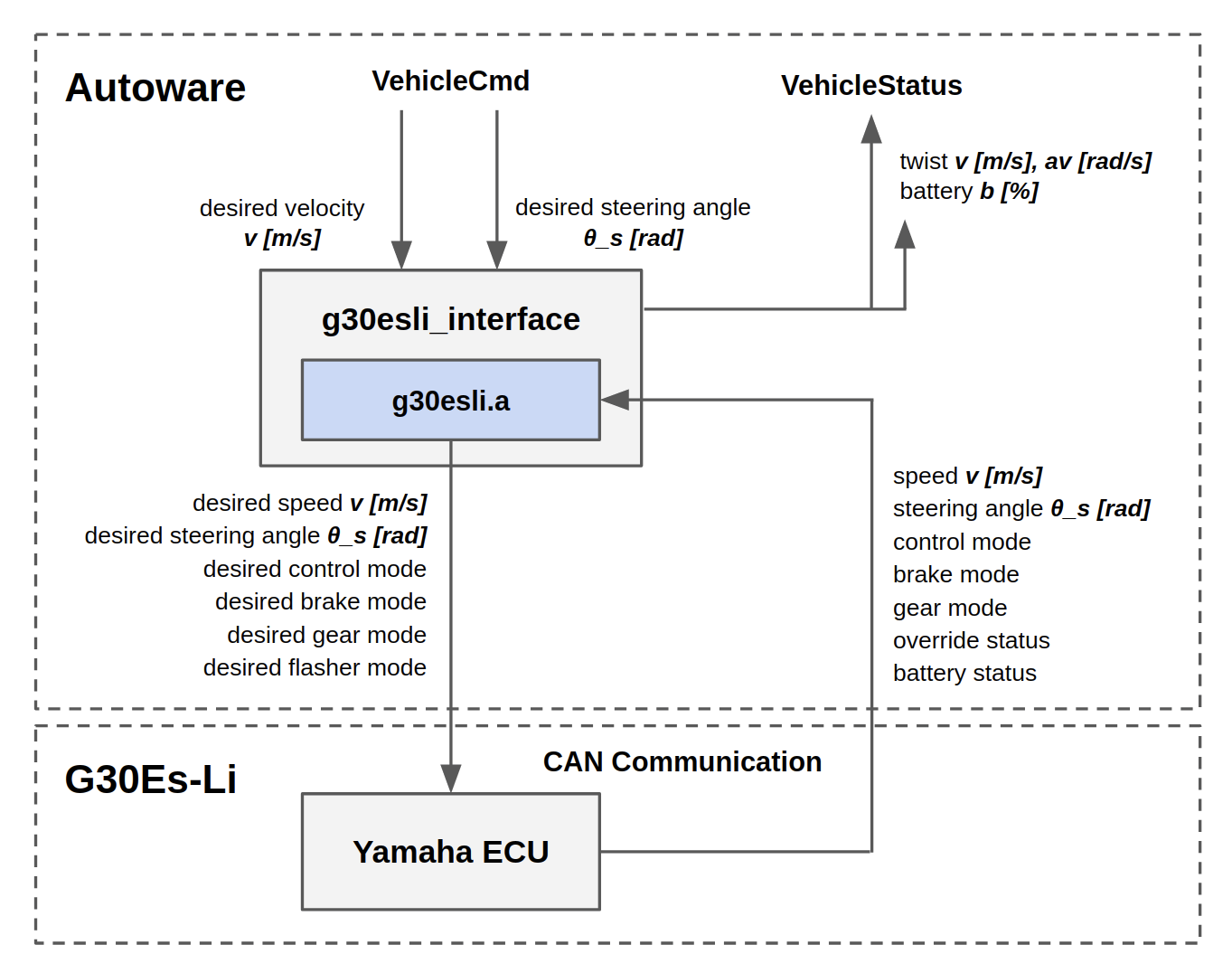
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
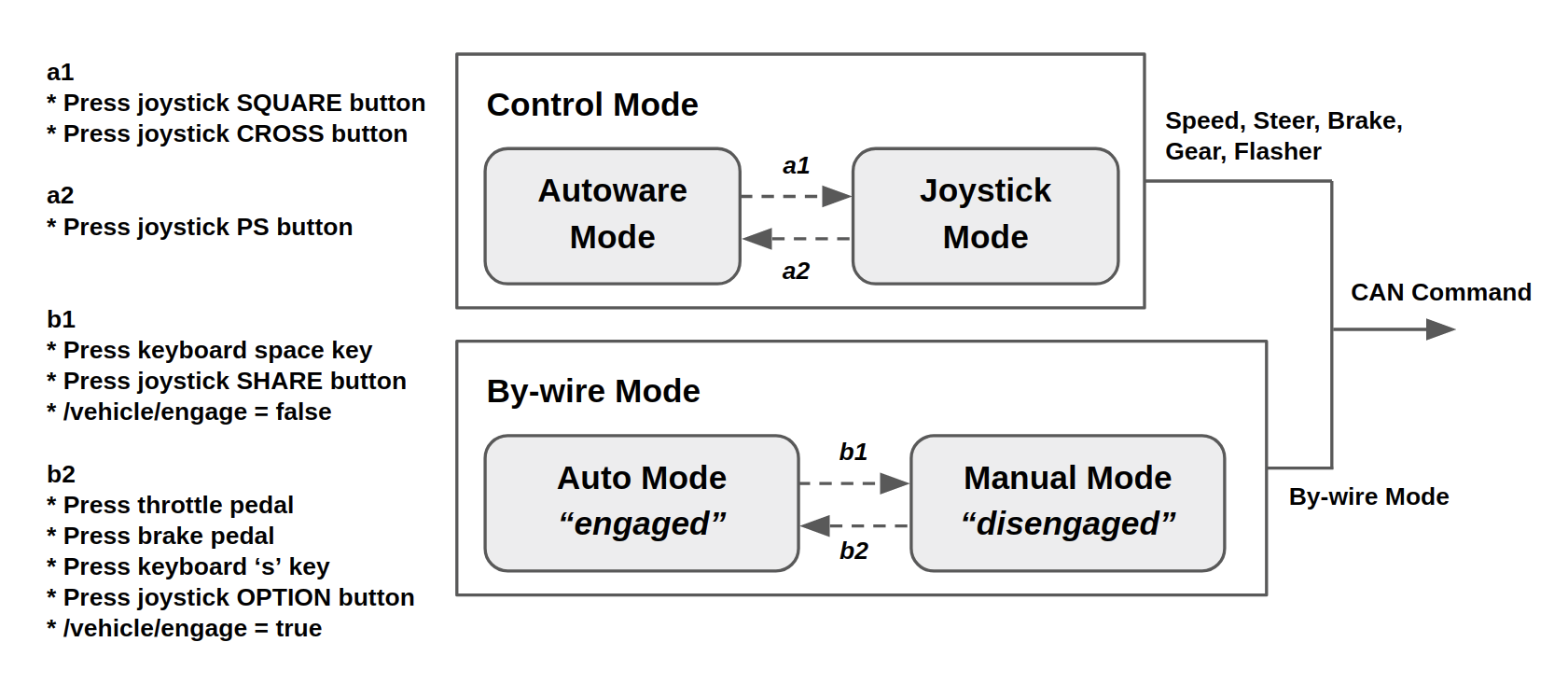
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]
Messages
Services
Plugins
Recent questions tagged ymc at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]
Messages
Services
Plugins
Recent questions tagged ymc at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]
Messages
Services
Plugins
Recent questions tagged ymc at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]
Messages
Services
Plugins
Recent questions tagged ymc at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]
Messages
Services
Plugins
Recent questions tagged ymc at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]
Messages
Services
Plugins
Recent questions tagged ymc at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]
Messages
Services
Plugins
Recent questions tagged ymc at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]
Messages
Services
Plugins
Recent questions tagged ymc at Robotics Stack Exchange
Package Summary
| Version | 1.12.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Akihito Ohsato
Authors
- Akihito Ohsato
- T.Ando
YMC
The controller package for vehicles manufactured by Yamaha Motor Co., Ltd.
g30esli_interface
Yamaha Golfcar Academic Pack version of G30Es-Li has the By-wire ECU based on CAN communication.
CAN message format is private, so we provide CAN communication and parsing functions as a binary g30esli.a in ymc package.
This node has two modes and some condition of transition as in this figure. If you press throttle or brake pedal, By-wire mode is forced to transition to Manual Mode (override function).
- Control Mode: If you use a joystick, the command to a vehicle is able to be selected.
- Autoware Mode: CAN commands are generated following
/vehicle_cmdtopic. - Joystick Mode: CAN commands are generated following
/ds4topic.
- Autoware Mode: CAN commands are generated following
- By-wire Mode: You can change to enable/disable By-wire mode.
- Auto Mode: A vehicle allows to be controlled by CAN commands.
- Manual Mode: You can drive as usual.
How to Use
-
Confirm safety around your vehicle.
-
Launch Autoware nodes and check to correctly provide
/vehicle_cmdtopic. -
Connect and setup CAN interface. (NOTE: We generally use PEAK System PCAN-USB)
$ rosrun ymc canset up canX
4-1. Launch g30esli_interface node.
$ roslaunch ymc g30esli_interface.launch device:=canX
And then your car should move by vehicle_cmd topic.
4-2. If you want to use DS4 joystick, launch with use_ds4 option and connect your joystick controller.
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=true ## USB
or
$ roslaunch ymc g30esli_interface.launch device:=canX use_ds4:=true ds4_wired:=false ## Bluetooth
And then, your car should move by joystick controller. For controlling by vehicle_cmd, press PS button.
DS4 Button Binding
| Button | Description | | — | — | | CROSS | Send speed ( 3 <= v <= 19 [km/h] ), change to JOYSTICK mode | | SQUARE | Smooth brake, change to JOYSTICK mode | | CIRCLE | Semi-emergency brake | | TRIANGLE | Emergency brake | | R1 | Reverse shift | | L1 | Neutral shift | | R2 | Change speed linearly ( v = 16 * R2 + 3 [km/h] ) | | L2 | Change max steering linearly ( theta = (17 * L2 + 20) * ANALOG_L [deg] ) | | ANALOG_L | Steering angle ( -37 <= theta <= +37 [deg] ) | | DIGITAL_UP / LEFT / RIGHT / DOWN | Blinker clear / left / right / hazard | | SHARE | Engage vehicle | | OPTION | Disengage vehicle | | PS | change to AUTO mode |
Please see ds4 package to know installation and details.
Parameters
| Parameter | Type | Description | Default |
|---|---|---|---|
engaged |
Bool | Enable Auto Mode at startup | true |
device |
String | CAN interface name | can0 |
steering_offset_deg |
Double | Steering offset [deg] | 0.0 |
command_timeout |
Int |
vehicle_cmd timeout [ms] |
1000 |
use_ds4 |
Bool | Enable DS4 joystick and start in joystick mode | false |
ds4_wired |
Bool | Select DS4 connection (true = USB, false = Bluetooth) | false |
ds4_timeout |
Int | Bluetooth timeout in ds4_driver [ms] |
1000 |
Subscriptions/Publications
Node [/g30esli_interface]
Publications:
* /vehicle/battery [std_msgs/Float32]
* /vehicle/twist [geometry_msgs/TwistStamped]
* /vehicle_status [autoware_msgs/VehicleStatus]
Subscriptions:
* /vehicle/engage [std_msgs/Bool]
* /vehicle_cmd [autoware_msgs/VehicleCmd]
Changelog for package ymc
1.11.0 (2019-03-21)
- [fix] Install commands for all the packages
(#1861)
-
Initial fixes to detection, sensing, semantics and utils
-
fixing wrong filename on install command
-
Fixes to install commands
-
Hokuyo fix name
-
Fix obj db
-
Obj db include fixes
-
End of final cleaning sweep
-
Incorrect command order in runtime manager
-
Param tempfile not required by runtime_manager
-
- Fixes to runtime manager install commands
-
Remove devel directory from catkin, if any
-
Updated launch files for robosense
-
Updated robosense
-
Fix/add missing install (#1977)
-
Added launch install to lidar_kf_contour_track
-
Added install to op_global_planner
-
Added install to way_planner
-
Added install to op_local_planner
-
Added install to op_simulation_package
-
Added install to op_utilities
-
Added install to sync
-
- Improved installation script for pointgrey packages
-
Fixed nodelet error for gmsl cameras
-
USe install space in catkin as well
-
add install to catkin
-
Fix install directives (#1990)
-
Fixed installation path
-
Fixed params installation path
-
Fixed cfg installation path
- Delete cache on colcon_release
-
- Fix license notice in corresponding package.xml
- Contributors: Abraham Monrroy Cano, amc-nu
1.10.0 (2019-01-17)
- Fixes for catkin_make
- Switch to Apache 2 license (develop branch)
(#1741)
- Switch to Apache 2
* Replace BSD-3 license header with Apache 2 and reassign copyright to the Autoware Foundation.
- Update license on Python files
- Update copyright years
- Add #ifndef/define _POINTS_IMAGE_H_
- Updated license comment
- Use colcon as the build tool
(#1704)
- Switch to colcon as the build tool instead of catkin
- Added cmake-target
- Added note about the second colcon call
- Added warning about catkin* scripts being deprecated
- Fix COLCON_OPTS
- Added install targets
- Update Docker image tags
- Message packages fixes
- Fix missing dependency
- Add steering offset parameter
- Add catkin dependency
- Apply clang-format
- Replace twist_cmd -> vehicle_cmd on ymc interface
- Contributors: Akihito Ohsato, Esteve Fernandez, amc-nu
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| autoware_build_flags | |
| catkin | |
| autoware_msgs | |
| ds4_msgs | |
| geometry_msgs | |
| ros_observer | |
| rosconsole | |
| roscpp | |
| std_msgs |
System Dependencies
| Name |
|---|
| can-utils |
Dependant Packages
Launch files
- launch/g30esli_interface.launch
-
- engaged [default: true]
- device [default: can0]
- steering_offset_deg [default: 0.0]
- command_timeout [default: 1000]
- use_ds4 [default: false]
- enable_reverse_motion [default: false]
- ds4_wired [default: false]
- ds4_timeout [default: 1000]