
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
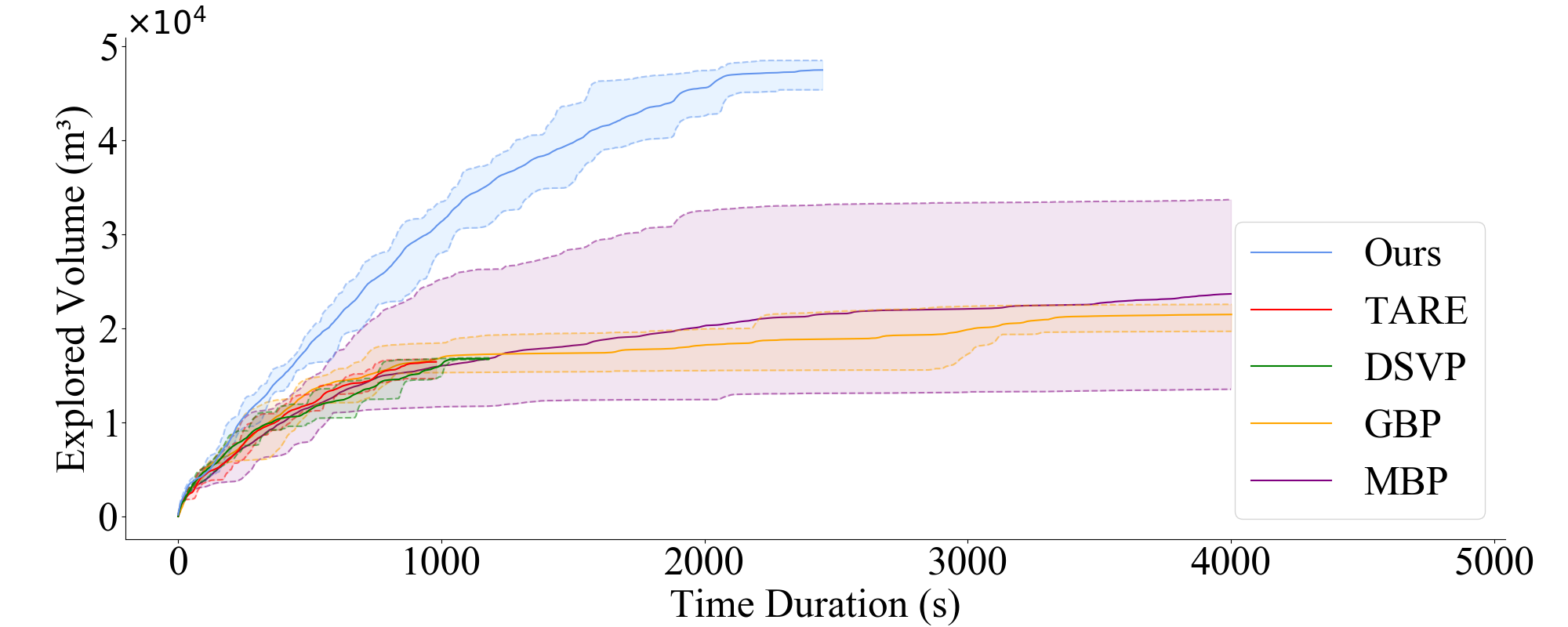
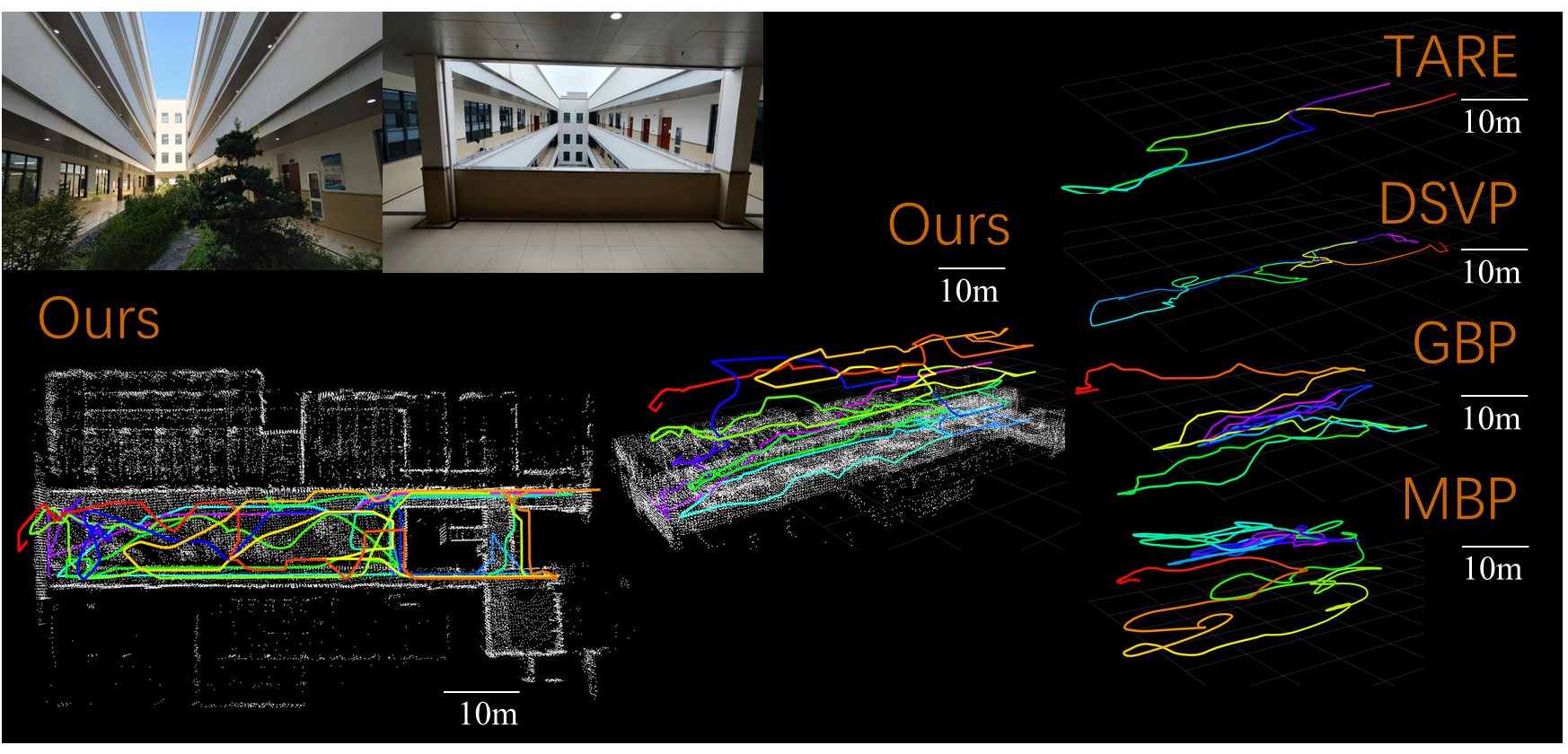
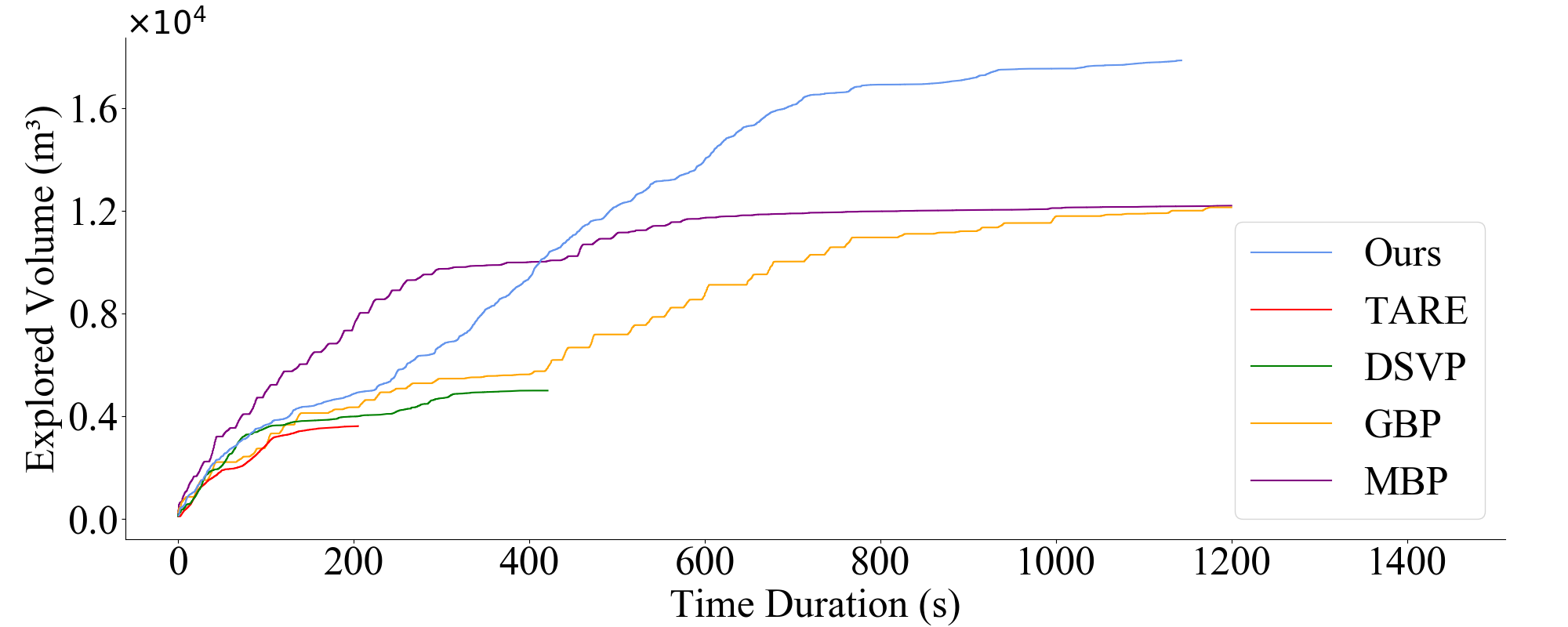
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
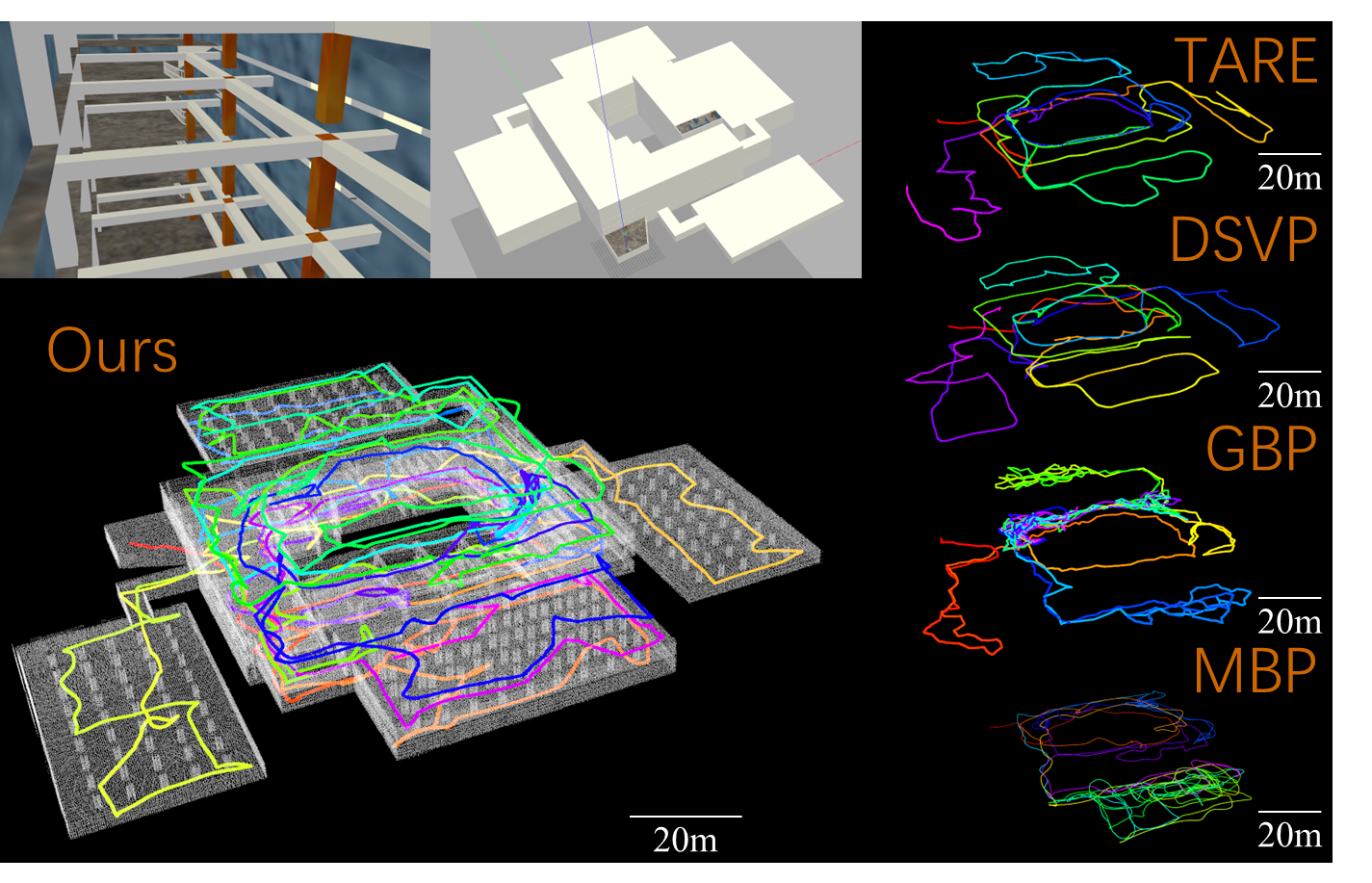
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—


File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssssuxin/code_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-16 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| uav_planner | 0.0.0 |
README
code_planner
The paper “CODE: Complete Coverage UAV Exploration Planner using Dual-Type Viewpoints for Multi-Layer Complex Environments” has been accepted by RA-L in December 12th, 2024.
Expeiments Videos
We have designed several experimental evironments to validate the capability of our method. Updates are ongoing.
Experiment ① “Narrow Tunnel”: https://youtu.be/jENgJ3dgBa0 or https://www.bilibili.com/video/BV1h18YejEWP/
Experiment ② “Narrow Tunnel: DSVP VS CODE”: https://www.youtube.com/watch?v=VOSmzPwXvmc or https://www.bilibili.com/video/BV1vMvKesEBz/
Experiment ③ “Garage-D” : https://www.youtube.com/watch?v=5gJdlG9kfTY or https://www.bilibili.com/video/BV14DeZe9Ev3/
Comparison between 2D and 3D exploration tasks
https://youtu.be/98l-RHV5oCA
Explorration in Garage-D with different robot-init-point
https://youtu.be/04E0oGMSxJ8
Requirement
Ubuntu20.04
Ros2 Foxy
Simulation environment
①Garage-D garage with part of it’s driveway destoryed: https://github.com/ssssuxin/autonomous_navigation_environment_ego
②narrow tunnel: https://github.com/ssssuxin/autonomous_navigation_environment_ros1
Usages
Please follow step “Simulation environment” to install experimental environments first.
Garage-D
in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch ego_planner uav_new_garage.launch.py
ros2 launch visualization_tools visualization_tools.launch.py
(If anything wrong with rendering simulation environment, please try copy directory “new_garage_v2”(in src/vehicle_simulator/mesh) to “~/.gazebo/models”)
in planner
ros2 launch uav_planner garage_D_uav.launch.py (Stable_version) or
ros2 launch uav_planner 5_21_new_garage_invalid.launch.py (Fast_version) Performing Fast_version, please set "max_vel" and "max_acc" as 5.0 and 2.5 respectively in "single_run_in_sim.launch.py" of project env. ### Narrow Tunnel in env_ros1 (https://github.com/ssssuxin/autonomous_navigation_environment_ros1)
roslaunch vehicle_simulator narrow_tunnel.launch in env_ego (https://github.com/ssssuxin/autonomous_navigation_environment_ego)
ros2 launch visualization_tools visualization_tools_for_tunnel.launch.py in planner
ros2 launch uav_planner tunnel_guv.launch.py in a new terminate
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run ros1_bridge dynamic_bridge note: you cloud install ros1_bridge by apt-get or https://github.com/ros2/ros1_bridge
Results of Tests
Test 1
Check https://youtu.be/cI60Tal7ov0 for tra comparison.
CODE TARE
Test 2
Test 3
Check https://youtu.be/bqUJAKtqXxA for tra comparison.
CODE TARE
<!—
File truncated at 100 lines see the full file