
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
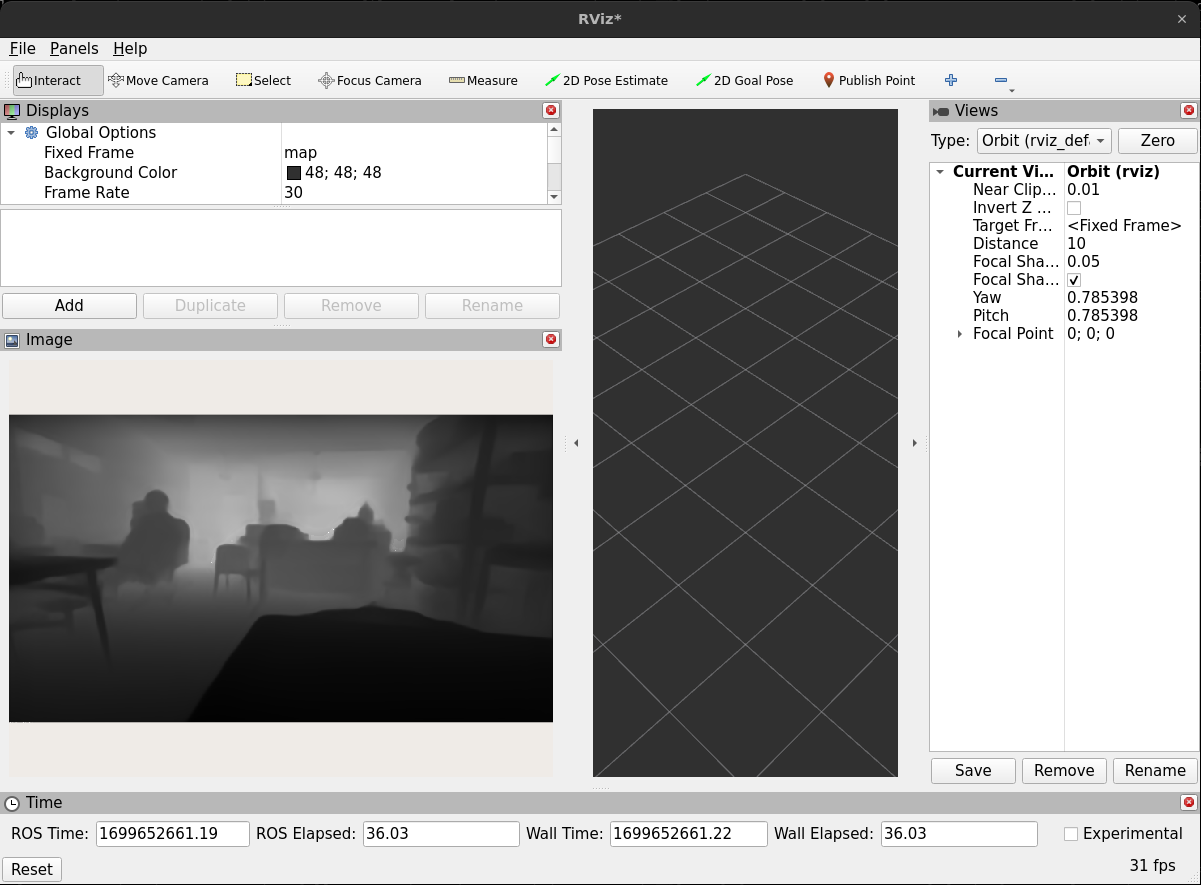
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.
CONTRIBUTING
|
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.
CONTRIBUTING
|
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.
CONTRIBUTING
|
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.
CONTRIBUTING
|
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.
CONTRIBUTING
|
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.
CONTRIBUTING
|
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.
CONTRIBUTING
|
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.
CONTRIBUTING
|
|
depthstream-accelerator-ros2-integrated-monocular-depth-inference repositorymonocular_depth |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/jagennath-hari/depthstream-accelerator-ros2-integrated-monocular-depth-inference.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| monocular_depth | 0.0.0 |
README
DepthStream-Accelerator-ROS2-Integrated-Monocular-Depth-Inference
DepthStream Accelerator: A TensorRT-optimized monocular depth estimation tool with ROS2 integration for C++. It offers high-speed, accurate depth perception, perfect for real-time applications in robotics, autonomous vehicles, and interactive 3D environments.
🏁 Dependencies
1) NVIDIA Driver (Official Link) 2) CUDA Toolkit (Official Link) 3) cuDNN (Official Link) 4) TensorRT (Official Link) 5) OpenCV CUDA (Github Guide) 6) Miniconda (Official Link) 7) ROS 2 Humble (Official Link) 8) ZoeDepth (Official Link)
⚙️ Creating the Engine File
ONNX File
Create the onnx file cd monocular_depth/scripts/ZoeDepth/ && python trt_convert.py. The ONNX file gets saved in the working directory as zoe_nk.onnx, configure the input dimensions as per your input image dimensions (h, w).
You can download a prebuilt .onnx file from LINK.
TensorRT engine creation
Once you have the .onnx file created go into the tensorRT trtexec directory. Mostly this is cd /usr/src/tensorrt/bin/. Now it is time to create the engine file, this could take a few minutes to create. Run the command below,
./trtexec --onnx=zoe_nk.onnx --builderOptimizationLevel=3 --useSpinWait --useRuntime=full --useCudaGraph --precisionConstraints=obey --allowGPUFallback --tacticSources=+CUBLAS,+CUDNN,+JIT_CONVOLUTIONS,+CUBLAS_LT --inputIOFormats=fp32:chw --outputIOFormats=fp32:chw --sparsity=enable --layerOutputTypes=fp32 --layerPrecisions=fp32 --saveEngine=zoe_nk.trt
🖼️ Running Depth Estimation
Build the ROS2 workspace
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
Inference
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=true With GUI.
ros2 launch monocular_depth mono_depth.launch.py trt_path:=zoe_nk.trt image_topic:=/rgb/image_rect_color gui:=false Without GUI.
GUI
DEPTH MAP
💬 ROS2 Message
The depth map gets published as sensor_msg/Image in the /mono_depth/depthMap topic
⚠️ Note
1) There is a know problem with MiDAS which doesnt allow tracing the network. 2) If the input image dimensions are changed, change the source code to match your image dimension inputs.