
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。

Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
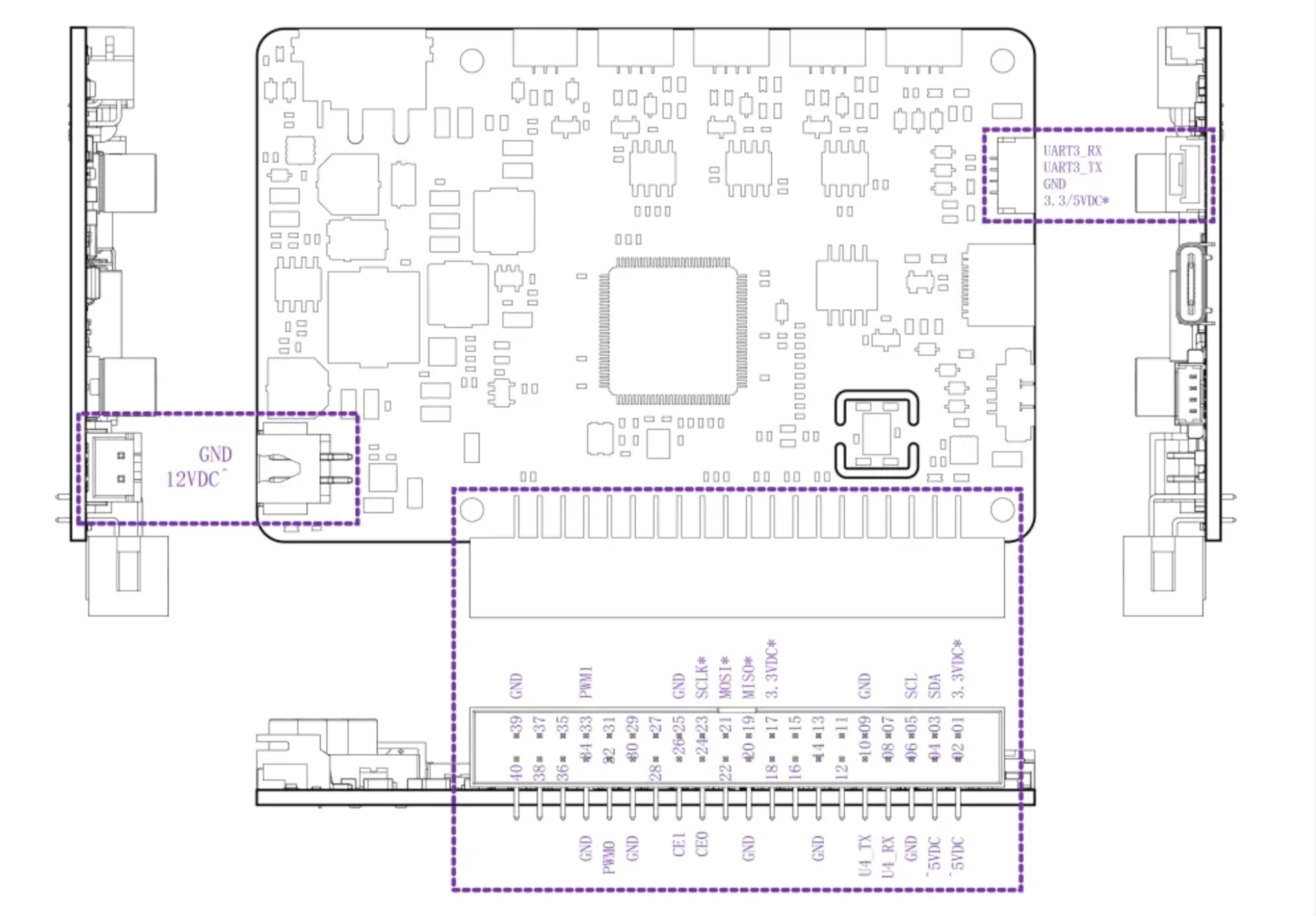
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。
Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。
Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。
Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。
Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。
Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。
Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。
Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
diablo_ros2 repositorydiablo_body diablo_utils diablo_ctrl diablo_teleop ception_msgs motion_msgs diablo_rviz2_control_plugin diablo_simpose_trans diablo_simulation |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ddtrobot/diablo_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| diablo_body | 1.0.0 |
| diablo_utils | 1.0.0 |
| diablo_ctrl | 1.0.0 |
| diablo_teleop | 1.0.0 |
| ception_msgs | 1.0.0 |
| motion_msgs | 1.0.0 |
| diablo_rviz2_control_plugin | 1.0.0 |
| diablo_simpose_trans | 1.0.0 |
| diablo_simulation | 1.0.0 |
README
DIABLO ROS2
语言:English / 中文
基于串口通信的 DIABLO 机器人二次开发控制接口,您可以通过 ROS2 快速上手。如果您想要不通 ROS 进行开发,也可以在 ROS 中修改 CMakeLists 的方式只对源码进行编译。我们将不断的更新 ROS2 的功能节点 , 希望能对您的机器人开发有所帮助。
Basic Information 基本信息
-
X3pi默认用户是root, 密码为root -
树莓派中默认用户是
diablo,密码为diablo123 -
X3pi中IO默认串口号是/dev/ttyS3树莓派中IO默认串口号是
/dev/ttyAMA0,如果您使用自定义的镜像,请重新配置串口映射您可以通过修改 Hal.init(“/dev/ttyS3”) 并重新编译达到切换硬件的目的
-
ROS_DOMAIN_ID=5, 可通过export ROS_DOMAIN_ID=5连接并控制局域网中DIABLO的功能节点。
主控制引脚说明
Installation 安装
| Installation method | Supported platform[s] | Development Docs | Official website |
|---|---|---|---|
| Source | Linux , ros-foxy | DIABLO 开发手册 | Direct drive |
您可以在大多数 Linux 设备中,编译我们的 SDK 源码。或者在支持 ros-foxy 的设备中直接编译我们提供的 ros 包,注意编译之前需要做重新配置串口映射,到达切换硬件设备。
Quick Start 快速开始
准备工作
在连接机器人之前,需要做下述准备工作:
显示
开发板支持HDMI显示接口,通过HDMI线缆连接开发板和显示器,支持图形化桌面显示。
网络连接
开发板支持有线以太网、无线WiFi两种网络接口,用户可通过任意接口实现网络连接功能。
登录系统
开发板支持Ubuntu 20.04 Desktop、Server两个系统版本,用户结合个人习惯自由选择使用,以获得更自由的体验。如果用户更熟悉命令行交互操作方式,可以使用不带图形化桌面的Ubuntu Server版本。
在此之前,机器人出厂已经部署ROS2驱动包无需用户自行部署,跳过ros_ws创建,如做了硬件设备切换,需要做重新部署
- 创建ros工程文件夹
#make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions
mkdir -p ~/diablo_ws/src
cd ~/diablo_ws/src
#clone API source code
git clone -b basic https://github.com/DDTRobot/diablo_ros2.git
cd ~/diablo_ws
colcon build
source install/setup.bash
#before starting the node , please check of serial port in diablo_ctrl.cpp is correct.
ros2 run diablo_ctrl diablo_ctrl_node
#run controller python script
ros2 run diablo_teleop teleop_node
- 完整版编译
```bash #make sure you have build all dependence.
sudo apt-get install python3-colcon-common-extensions python3-pip sudo pip3 install rosdep sudo rosdep init rosdep update mkdir -p ~/diablo_ws/src cd ~/diablo_ws/src
#clone API source code git clone https://github.com/DDTRobot/diablo_ros2.git cd ~/diablo_ws rosdep install -i –from-path src –rosdistro foxy -y
colcon build source install/setup.bash
File truncated at 100 lines see the full file