
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving

Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
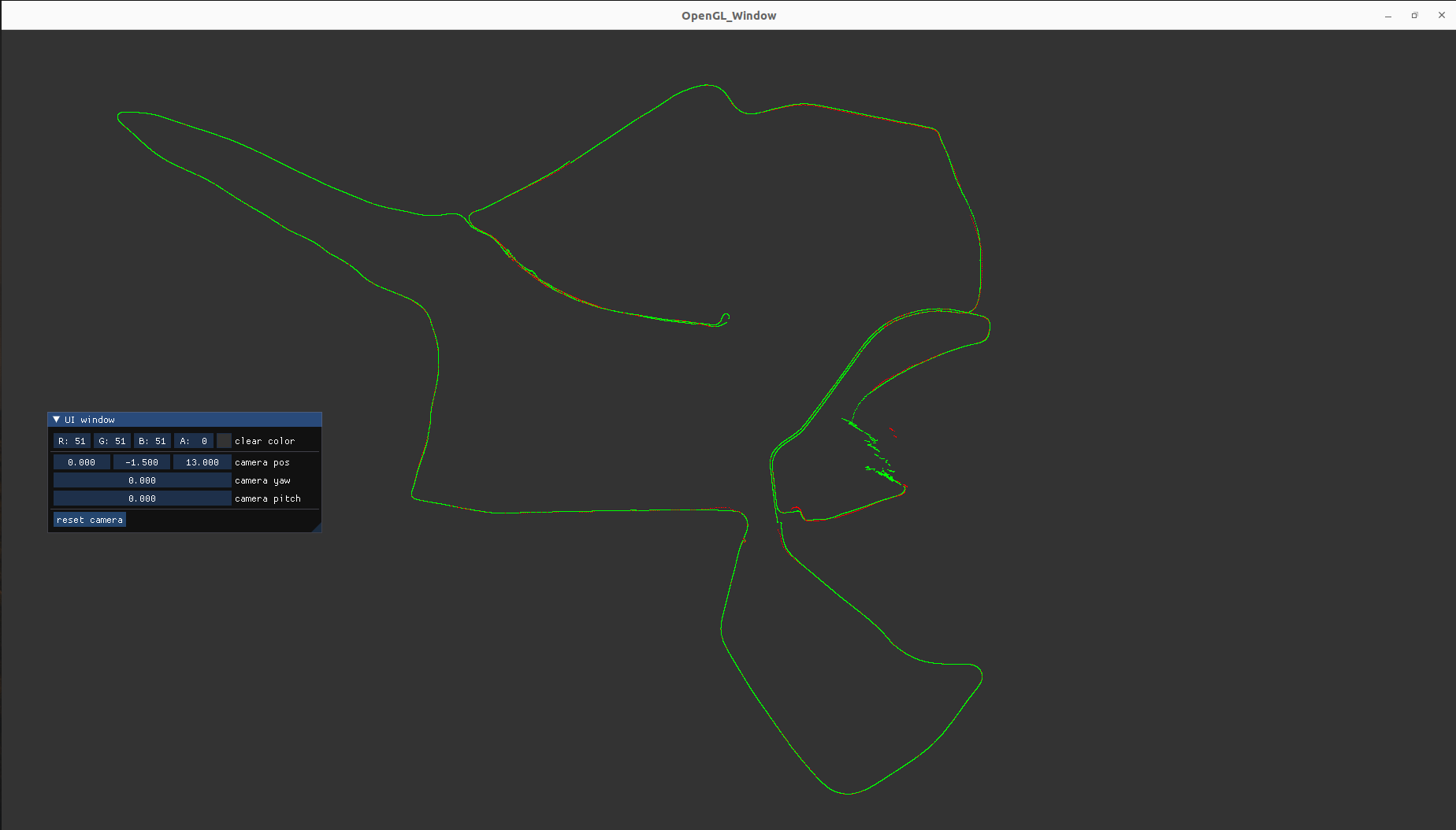
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
Result
- GNSS position(Red)
- Filtered position(Green)