
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README

##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
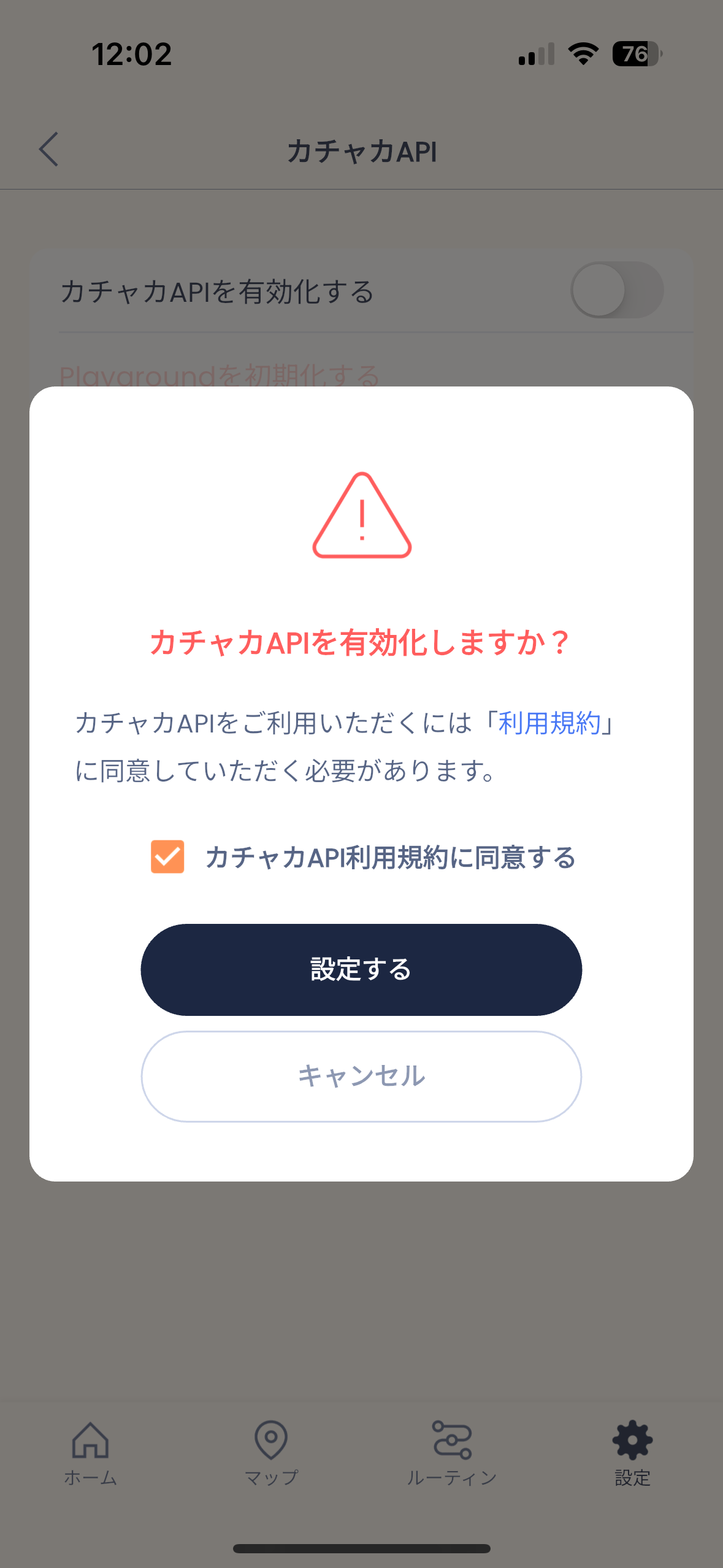
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
 |
 |
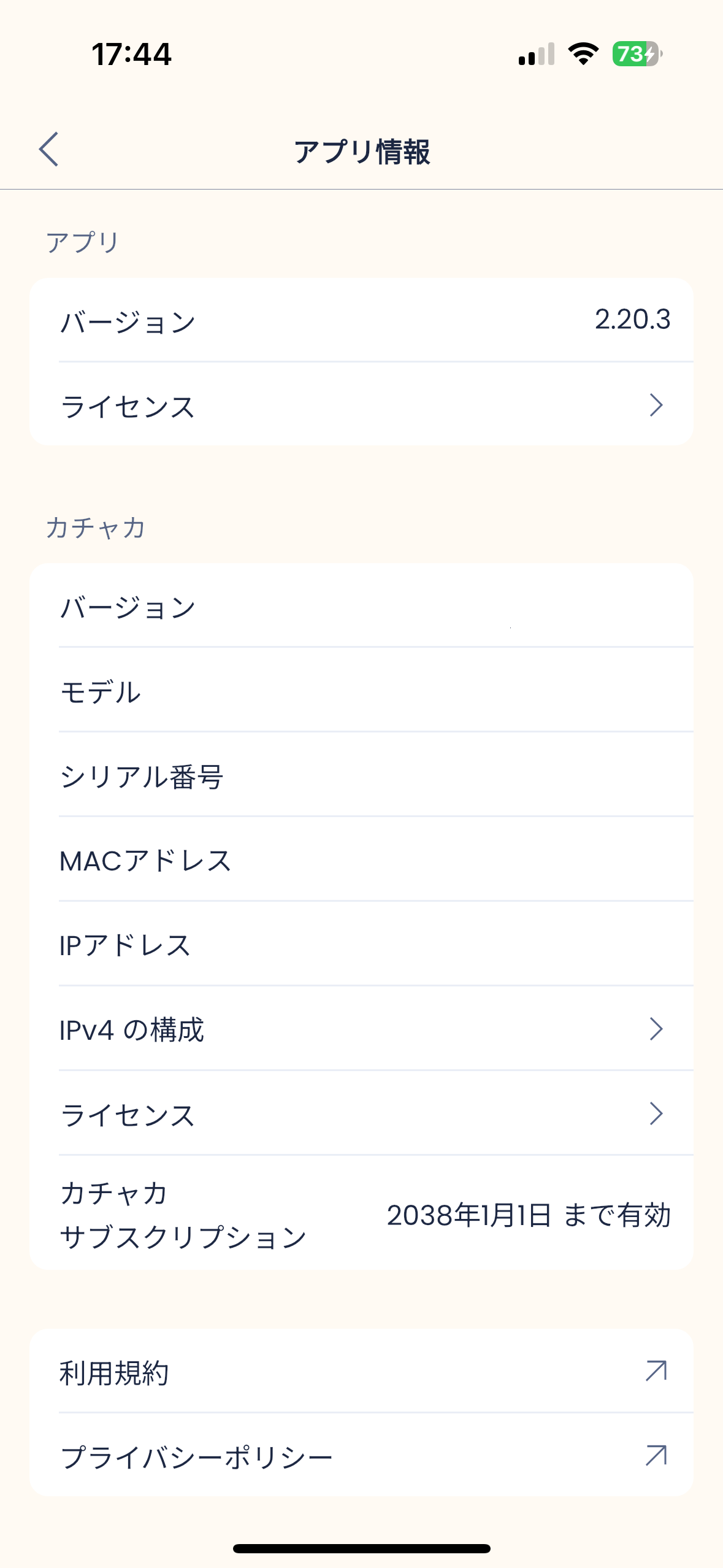
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
 |
 |
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。
|
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README
##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
|
|
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
|
|
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。
|
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README
##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
|
|
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
|
|
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。
|
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README
##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
|
|
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
|
|
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。
|
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README
##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
|
|
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
|
|
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。
|
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README
##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
|
|
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
|
|
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。
|
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README
##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
|
|
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
|
|
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。
|
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README
##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
|
|
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
|
|
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。
|
|
kachaka-api repositorykachaka_follow kachaka_nav2_bringup kachaka_smart_speaker kachaka_speak kachaka_vision kachaka_description kachaka_grpc_ros2_bridge kachaka_interfaces |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/pf-robotics/kachaka-api.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| kachaka_follow | 0.0.0 |
| kachaka_nav2_bringup | 1.0.12 |
| kachaka_smart_speaker | 0.0.0 |
| kachaka_speak | 0.0.0 |
| kachaka_vision | 0.0.0 |
| kachaka_description | 0.0.0 |
| kachaka_grpc_ros2_bridge | 0.0.0 |
| kachaka_interfaces | 0.0.0 |
README
##
スマートファニチャー・プラットフォーム「カチャカ」 のAPIを提供するリポジトリです。
カチャカAPIは、カチャカのドッキングや移動を制御したり、カチャカの状態やセンサー値を取得したりするための機能を提供します。
- ローカルネットワーク内の機器、あるいはカチャカ体内にあるユーザー環境(Playground)からのアクセスが可能です。
-
この公式リポジトリでは、PythonやROS 2で簡単にカチャカAPIを利用できるSDKを提供しています。
- カチャカAPIで利用可能な機能一覧については、「カチャカAPIでできること」をご覧ください。
公式で提供するSDK
- 🐍 Python 3.10+
- 🤖 ROS 2 Humble (Ubuntu 22.04 LTS)
その他の言語
カチャカAPIはgRPCを使用した通信インターフェースとして提供されています。 これ以外の言語でも、gRPCを直接利用してアクセスすることが可能です。
はじめに
カチャカAPIの有効化
[!IMPORTANT] どんな使い方をする場合でも、まずはじめにスマートフォンアプリを使ってカチャカAPIを有効にする必要があります。
- カチャカに接続し、[⚙設定]のタブから接続するロボットを選択、[カチャカAPI]ページを開いて「カチャカAPIを有効化する」をONにします。
- ダイアログが表示されるので、「利用規約」を確認の上、「カチャカAPI利用規約に同意する」をチェックして「設定する」を押して下さい。
|
|
カチャカのIPアドレスの確認
- またいずれの場合にも、カチャカのIPアドレスが必要になります。
- [⚙設定] > [アプリ情報] から確認することができます。(以下のキャプチャは白塗りしてあります)
- また、mDNSによる名前解決に対応しており、同画面の「シリアル番号」からなる
-
kachaka-<シリアル番号>.localというホスト名でもアクセス可能です。
-
|
|
カチャカAPIマニュアル
- 📖 カチャカAPIでできること
- カチャカAPIでできることをまとめています。
- 🚀 カチャカAPIを簡単に試してみる (JupyterLab)
- Webブラウザから、JupyterLabを使ってカチャカAPIを利用する方法を説明します。
- OS環境を問わず広く利用できるため、カチャカAPIの動作確認やサンプルコードの実行におすすめです。
- 🐍 PythonでカチャカAPIを利用する
- PythonでカチャカAPIを利用する方法を説明します。
- 🤖 ROS 2でカチャカAPIを利用する
- ROS 2でカチャカAPIを利用する方法を説明します。
- 🏠 カチャカ体内 (Playground) で自作のプログラムを動かす
- カチャカ内部には、Playgroundというユーザー用の環境があります。
- 外部機器を用意せずとも、カチャカ体内で自作のプログラムを動かすことが可能です。
- 🌐 PythonやROS2以外の言語でカチャカAPIを利用する
- PythonやROS2以外の言語でカチャカAPIを利用する方法を説明します。
- 💻 WebアプリでカチャカAPIを利用する
- WebアプリでカチャカAPIを利用する方法を説明します。
💬 要望・バグ報告・コントリビューション
- カチャカAPIはOSSとして公開されています。要望やバグ報告など大歓迎です。コントリビューションガイドラインをご覧ください。
- 質問や要望などは、GitHub Discussions からお願いします。
License
Copyright 2023 Preferred Robotics, Inc. Licensed under the Apache License, Version 2.0.
CONTRIBUTING
kachaka-api コントリビューションガイド
このガイドは、kachaka-api への貢献に関心のあるすべての人を対象としています。私たちは、バグ報告、機能提案、コードの改善、ドキュメントの修正など、あらゆる形の貢献を歓迎します。
はじめに
kachaka-api への貢献は、プロジェクトをより良くするための貴重な手段です。このガイドラインに従うことで、あなたの貢献がスムーズに受け入れられ、プロジェクトに統合される可能性が高まります。ご協力ありがとうございます!
コントリビューションの種類
私たちは、以下のようなコントリビューションを歓迎しています。
- バグ報告: kachaka-api で発見したバグや不具合を報告してください。再現手順や環境情報などを詳しく記述していただけると助かります。
- コードの改善: 既存のコードの改善、リファクタリング、パフォーマンス向上など、コードに関する貢献は歓迎です。
- ドキュメントの修正: ドキュメントの誤字脱字の修正、内容の改善、不足している情報の追加など、ドキュメントに関する貢献も重要です。
- 機能提案: 新しい機能や改善案を提案してください。具体的なユースケースや期待される効果などを説明していただけると議論しやすくなります。
コントリビューションの手順
バグ報告や機能提案
-
Issue の作成と確認:
- バグ報告や機能提案を行う場合は、GitHub IssuesにIssueを作成してください。
- 既存のIssueがないか確認し、もし同じようなIssueがあれば、そちらに参加してください。
- Issueを作成する際は、問題や提案の内容を明確かつ具体的に記述してください。
コードの貢献
- リポジトリのフォーク: GitHub (または他のプラットフォーム) 上のプロジェクトのリポジトリをあなたの個人アカウントにフォークしてください。
- ブランチの作成: 作業を開始する前に、新しいブランチを作成してください。ブランチ名は、関連するIssue番号や変更内容を反映したものにすると分かりやすいです。
git checkout -b feature-xyz-issue-123
- コードの変更とコミット: コードを変更し、コミットしてください。コミットメッセージは、変更内容を簡潔かつ分かりやすく記述すると良いですが、kachaka-api レポジトリではSquash Mergeを採用しているため、コミットメッセージの詳細度はあまり重要ではありません。
- プッシュ: ローカルの変更をリモートリポジトリ (あなたのフォーク) にプッシュしてください。
git push origin feature-xyz-issue-123
-
Pull Requestの作成: GitHub (または他のプラットフォーム) 上で、あなたのフォークしたリポジトリから元のリポジトリの
main(または開発ブランチ) に対してPull Requestを作成してください。- 重要: Pull Requestを作成する前に、以下のコマンドを実行してコードのスタイルと品質をチェックしてください。
./tools/lint/run_docker.sh
このスクリプトは、linterを実行し、コードがプロジェクトの規約に準拠しているかを確認します。 `-i` オプションを追加すると、可能なものは自動修正されます。エラーや警告が出た場合は、修正してからPull Requestを作成してください。
* Pull Requestのタイトルは、英語で変更内容を簡潔に記述してください。
* Pull Requestの説明欄には、変更の目的、背景、関連するIssue番号などを詳しく記述してください。こちらは日本語でも構いません。 1. **コードレビュー**: あなたのPull Requestは、プロジェクトのメンテナーによってレビューされます。フィードバックがあった場合は、それに対応してコードを修正し、再度プッシュしてください。必要に応じて、再度リンターを実行してください。 1. **マージ**: レビューが完了し、承認された場合、あなたのPull Requestは `main` ブランチににSquashマージされます。
コーディング規約
linterチェックが通ることと、ファイル内では一貫したスタイルが使用されていることを確認してください。
謝辞
kachaka-api に貢献してくださるすべての方々に感謝申し上げます。あなたの協力が、このプロジェクトをより良くします。