
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)

Yellow path: path without loop closure, Green path: modified path, Red: map
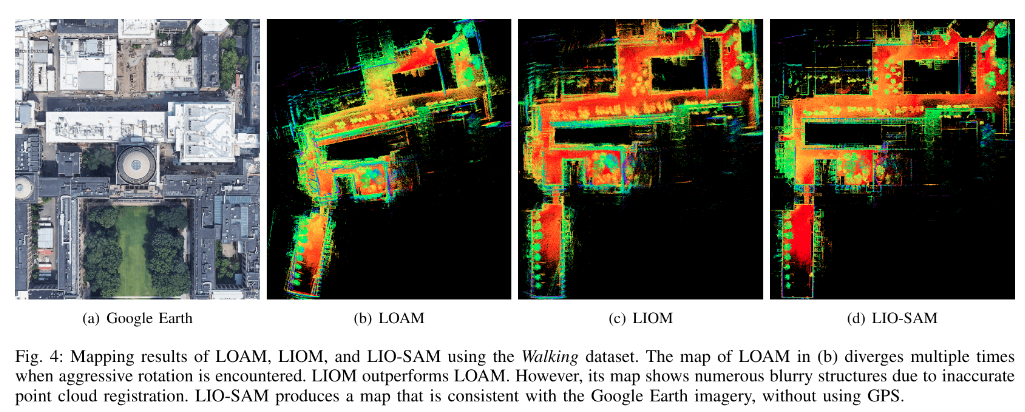
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
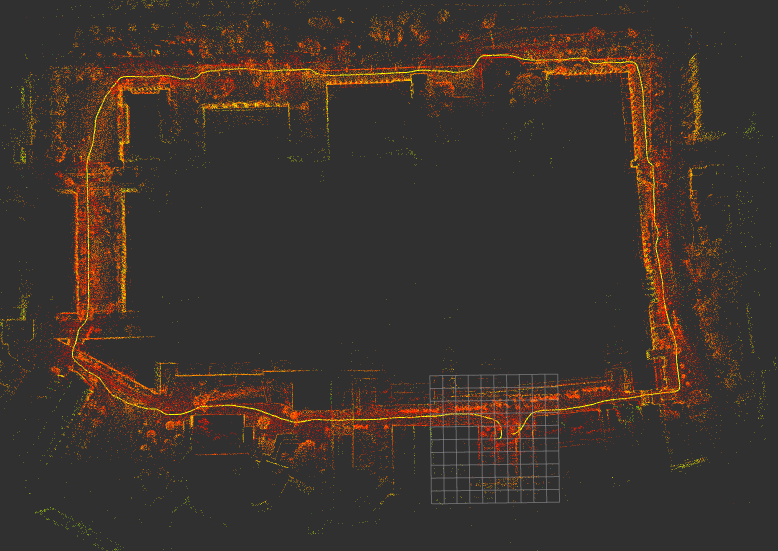
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
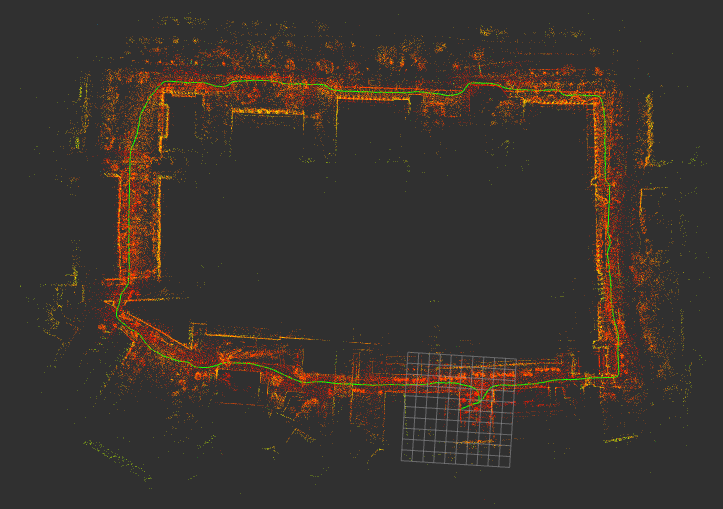
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph

pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)
Yellow path: path without loop closure, Green path: modified path, Red: map
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)
Yellow path: path without loop closure, Green path: modified path, Red: map
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)
Yellow path: path without loop closure, Green path: modified path, Red: map
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)
Yellow path: path without loop closure, Green path: modified path, Red: map
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)
Yellow path: path without loop closure, Green path: modified path, Red: map
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)
Yellow path: path without loop closure, Green path: modified path, Red: map
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)
Yellow path: path without loop closure, Green path: modified path, Red: map
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/rsasaki0109/li_slam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-12-23 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ndt_omp_ros2 | 0.0.0 |
| graph_based_slam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
li_slam_ros2
This package is a combination of lidarslam_ros2 and the LIO-SAM IMU composite method.
See LIO-SAM for IMU composites, otherwise see lidarslam_ros2.
- Walking dataset(casual_walk.bag)
Yellow path: path without loop closure, Green path: modified path, Red: map
Reference(From the LIO-SAM paper)
https://github.com/TixiaoShan/LIO-SAM/blob/master/config/doc/paper.pdf
- Campus dataset (large) demo(big_loop.bag)
Yellow path: path without loop closure, Red: map (the 10x10 grids in size of 10m × 10m)
Green path: modified path with loop closure, Red: map
requirement to build
You need ndt_omp_ros2 and gtsam for scan-matcher
clone
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/li_slam_ros2
gtsam install
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt update
sudo apt install libgtsam-dev libgtsam-unstable-dev
build
cd ~/ros2_ws
rosdep update
rosdep install --from-paths src --ignore-src -yr
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
Walking dataset demo(casual_walk.bag)
The optimization pipeline in Lidar Inertial SLAM were taken from LIO-SAM.
(Note: See the LIO-SAM repository for detailed settings regarding IMU.
The other thing to note is that the speed will diverge if the voxel_grid_size is large.
demo data(ROS1) in LIO-SAM
https://github.com/TixiaoShan/LIO-SAM
To use ros1 rosbag , use rosbags.
The Velodyne VLP-16 was used in this data.
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio.rviz
ros2 launch scanmatcher lio.launch.py
ros2 bag play walking_dataset/
Green arrow: pose, Yellow path: path, Green path: path by imu
Yellow path: path without loop closure, Green path: modified path, Red: map
rosgraph
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
Campus dataset (large) demo(big_loop.bag)
rviz2 -d src/li_slam_ros2/scanmatcher/rviz/lio_bigloop.rviz
File truncated at 100 lines see the full file