
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
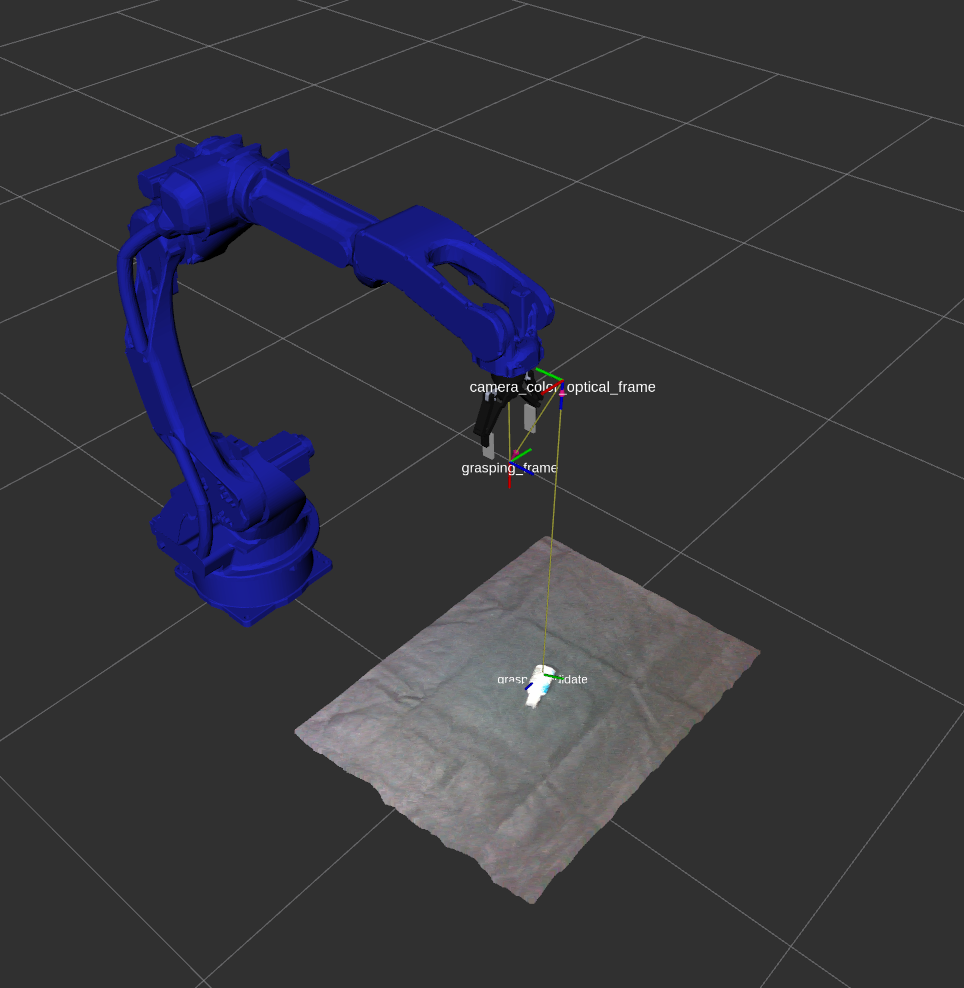
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
```bash
File truncated at 100 lines see the full file