
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
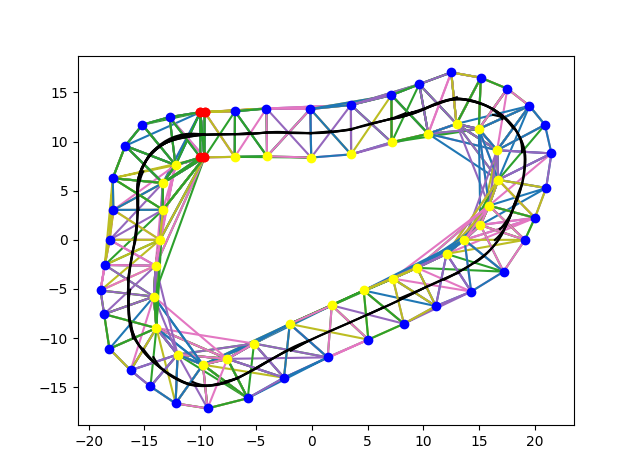
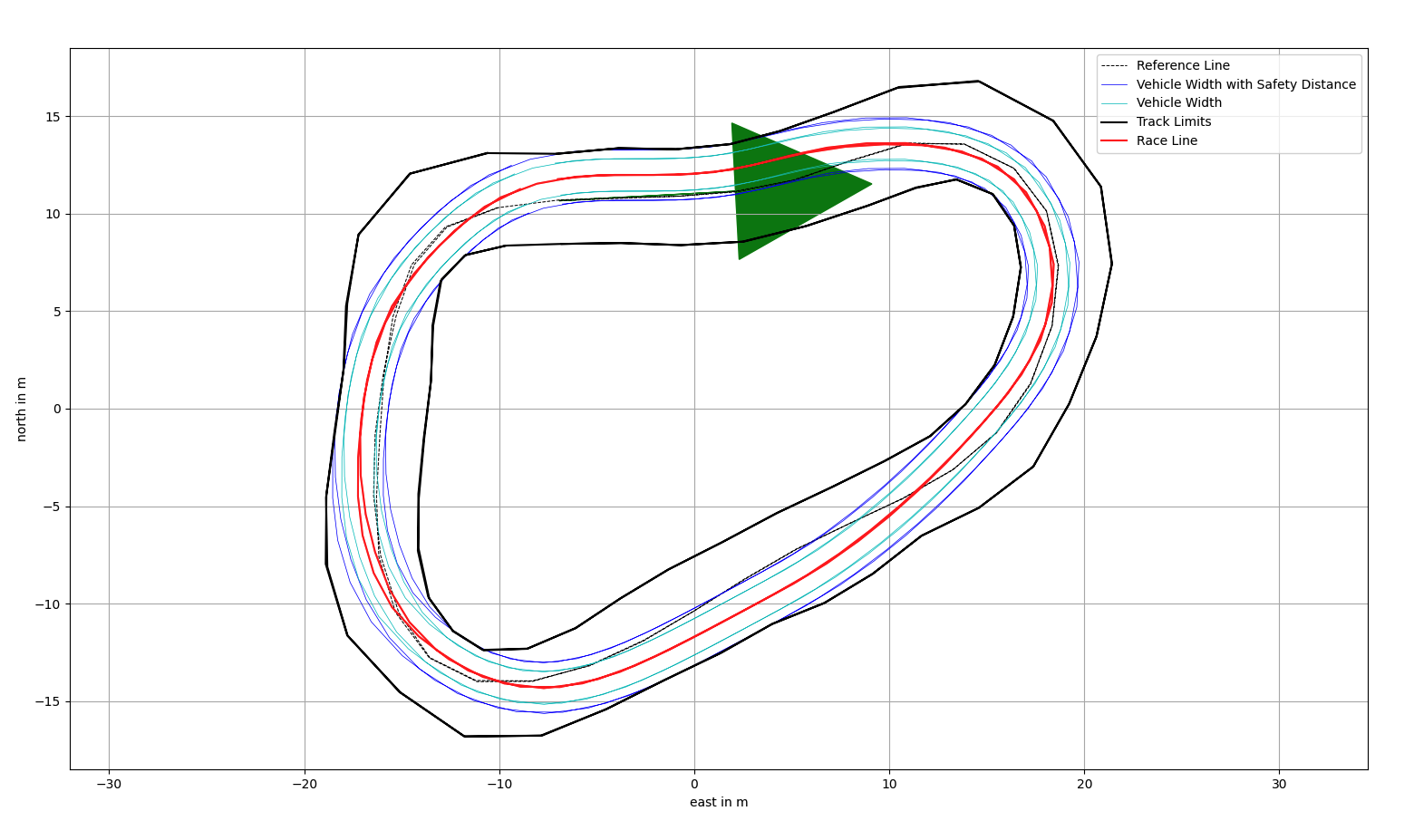
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/beomar97/path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interfaces | 0.0.0 |
| path_planning | 0.0.1 |
README
Path Planning
![]()
Path Planning
Path Planning package for the Autonomous System of Zurich UAS Racing.
Explore the thesis »
View Presentation
Table of Contents
About the Project
The implemented path planning algorithms manoeuvre the vehicle inside the track marked by cones. Sensors detect the cones (Perception) and the car’s position (Localisation).
The first algorithm, the so-called “Exploration Algorithm”, calculates the middle line of the track. The output of the exploration algorithm will be delivered to the second algorithm, the so-called “Optimization Algorithm”, which optimizes the middle line with the information of the car’s attributes to an optimal racing line.
Thesis
The corresponding thesis can be found under:
https://github.com/Beomar97/path-planning-docs
Workspace
Workspace structure
ROS_Path_Planning/ # Workspace Root
build/
install/
log/
launch/ # ROS Launch Files
path_planning_launch.py
src/ # All packages in src
fszhaw_msgs/ #ROS Custom Messages (Whole ZUR Autonomous System)
interfaces/ # ROS Custom Messages (Path Planning internally)
path_planning/ # Path Planner
path_planning/ # Code of package
algorithm/ # Algorithms specific Code
__init__.py
exploration/ # Exploration Algorithm
optimization/ # Optimization Algorithm
mock/ # Mock Nodes
__init__.py
cone_publisher.py
planned_trajectory_subscriber.py
model/ # Models
__init__.py
coordinate.py
mode.py
racetrajectory.py
refpoint.py
setup.py
tag.py
util/ # Utility Classes
__init__.py
path_planning_helpers.py
track_plotter.py
__init__.py
path_planner.py # Path Planner ROS Node
start_finish_detector.py
planned_path_filter.py
optimization_service.py # Optimization Service ROS Node
optimization_input_transformer.py
track_config.py # Track Configurations
resource/ # maps, parameters, ...
test/
package.xml # file containing meta information about the package
setup.cfg # required when a package has executables, so `ros2 run` can find them
setup.py # containing instructions for how to install the package
File truncated at 100 lines see the full file