
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
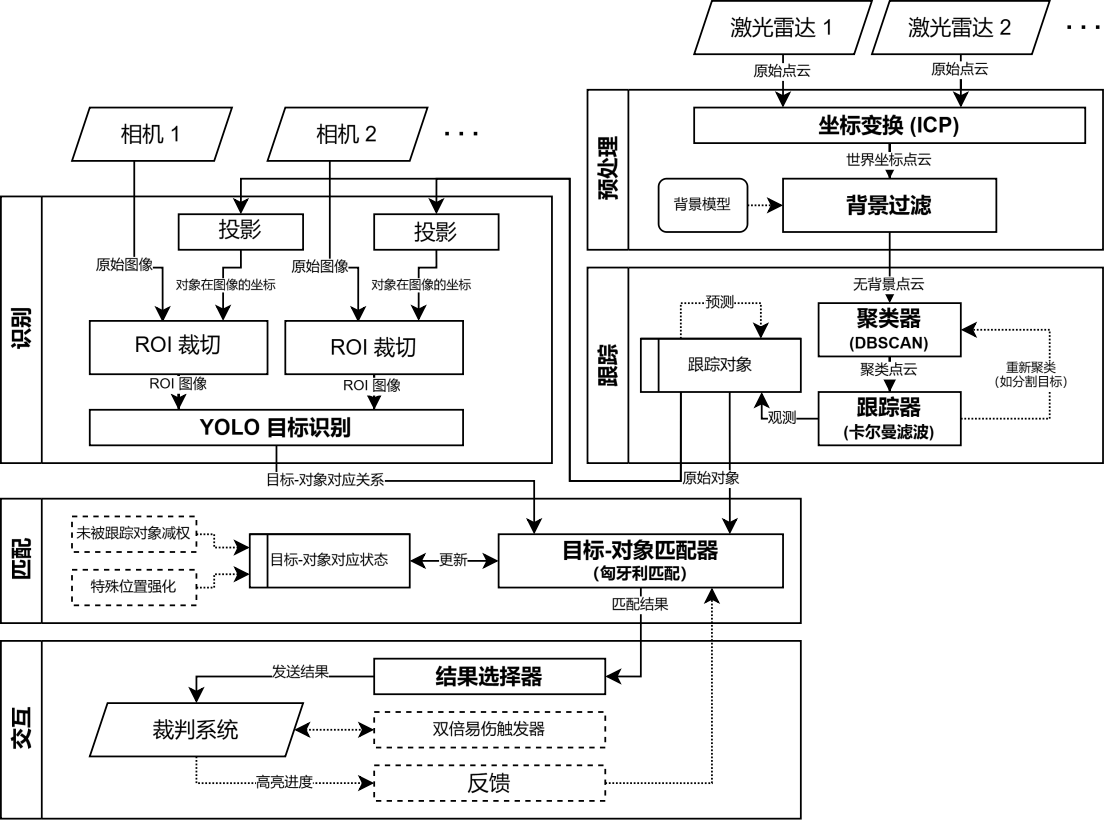
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pagechen04/radar_ros_ws.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-17 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| dv_trigger | 0.1.0 |
| hik_camera | 1.0.0 |
| img_recognizer | 0.0.0 |
| judge_bridge | 0.1.0 |
| livox_v1_lidar | 0.1.0 |
| livox_v2_lidar | 0.1.0 |
| nn_detector | 1.0.0 |
| pc_aligner | 0.0.0 |
| pc_detector | 0.1.0 |
| radar_bringup | 0.0.0 |
| radar_interface | 0.1.0 |
| radar_supervisor | 0.0.0 |
| radar_utils | 0.0.0 |
| result_visualizer | 0.0.0 |
| target_matcher | 0.0.0 |
| target_multiplexer | 0.1.0 |
| target_visualizer | 0.0.0 |
README
南工骁鹰雷达站工作空间
RoboMaster 2024 哈尔滨工业大学(深圳) 南工骁鹰战队 雷达站 完整开源
开源仓促,文档不够完善,还请见谅!
各包功能
livox_v1_lidar 激光雷达驱动(Livox Mid-70)
livox_v2_lidar 激光雷达驱动(Livox HAP)
pc_aligner 点云配准
pc_detector 点云聚类分割
hik_camera 海康相机驱动
img_recognizer 视觉识别
nn_detector 神经网络推理
target_matcher 聚类-识别匹配
judge_bridge 裁判系统驱动
dv_trigger 双倍易伤触发
target_multiplexer 目标选择器(国赛改协议前)
radar_bringup Launch 文件存放
radar_interface 协议
radar_utils 实用工具
target_visualizer 聚类目标可视化
result_visualizer 匹配结果可视化
radar_supervisor 状态监控
参考结构:
部署指南
目标平台: Ubuntu 22.04 (Jammy Jellyfish) + ROS 2 (Humble)
依赖安装
请参考 ROS 文档使用 rosdep 安装。其中有少部分依赖无法自动安装,请手动补全。
https://docs.ros.org/en/humble/Tutorials/Intermediate/Rosdep.html#rosdep-operation
编译
最简单的编译方式为:
# 在 Workspace 根目录下
colcon build
为了方便在 VSCode 上进行开发,我们在 .vscode/tasks.json 中预置了大量的编译命令,可直接执行。
运行
利用 radar_bringup 中的 Launch 文件一键运行。
source ./install/setup.bash
ros2 launch radar_bringup 24_national.launch.py
未来方向
- 点云聚类能力优化,提升抗遮挡、抗误合并能力
- 多模态融合,以得到更好的感知能力
- 部署自动化,减少人力消耗
- 单元测试,减少 Bug 的产生
- 与自动兵种紧密结合
本项目以 Mozilla Public License 2.0 授权