
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
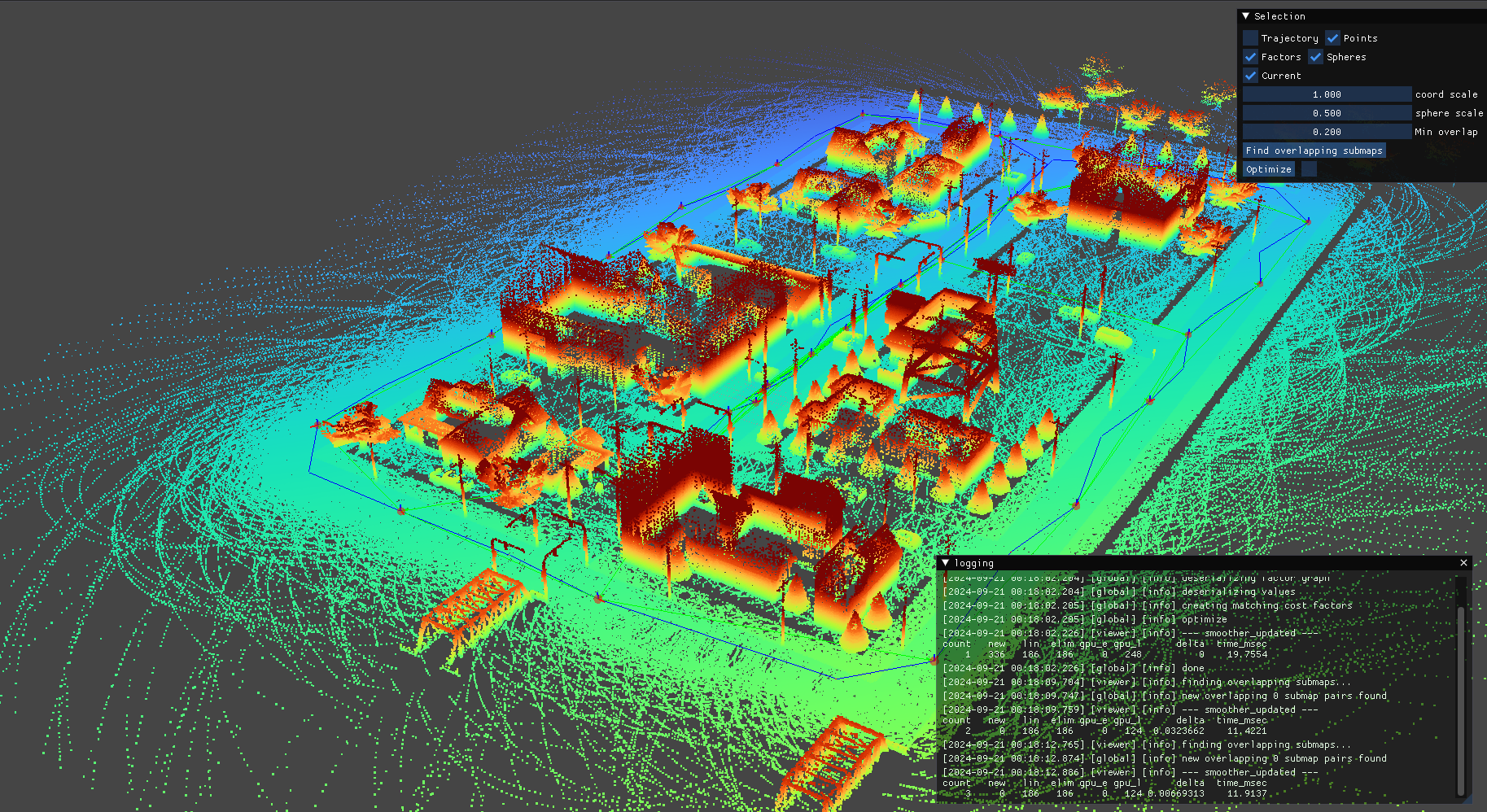
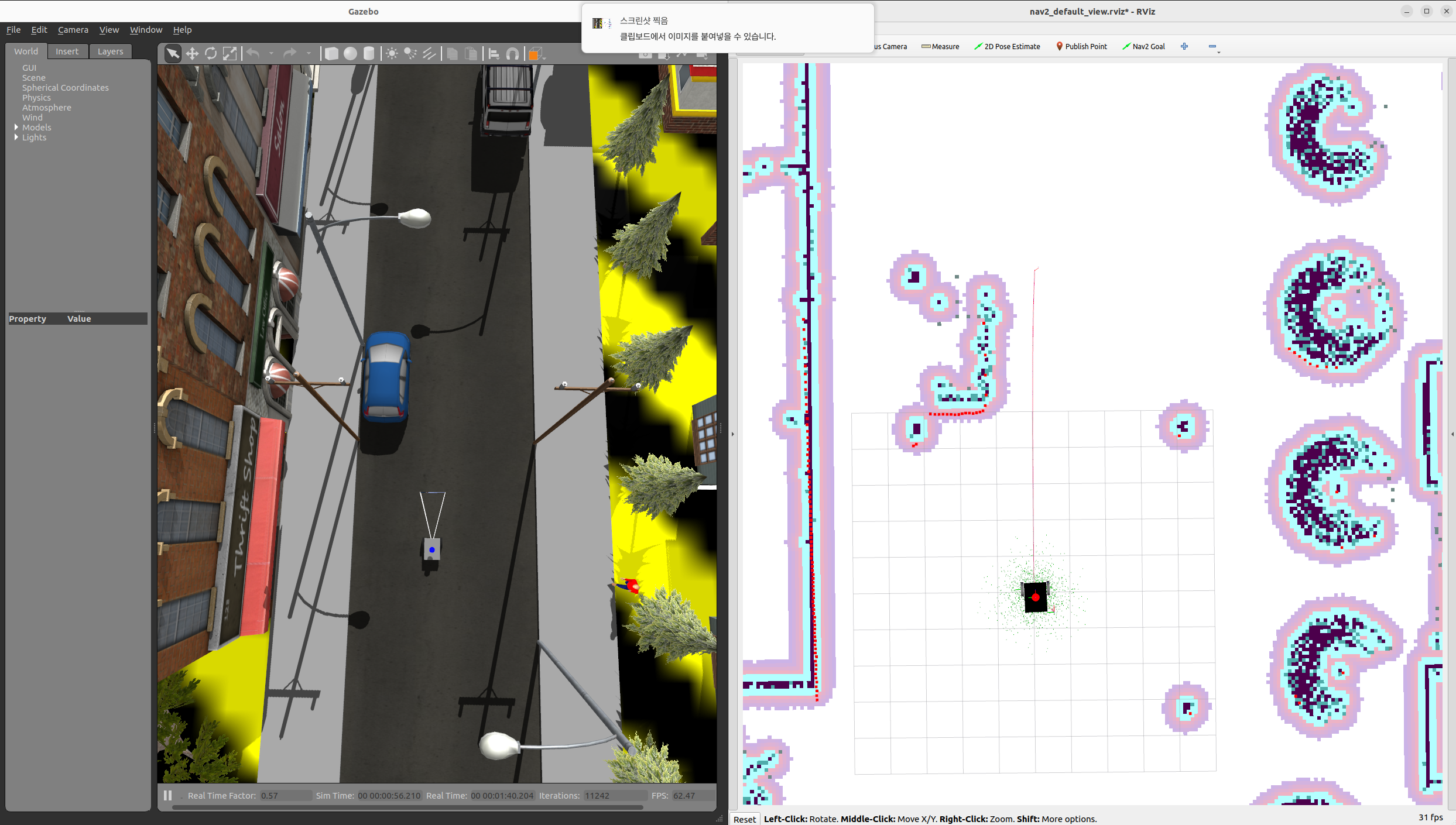
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.

1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.
1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.
1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.
1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.
1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.
1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.
1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.
1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rdsim repositoryrdsim_description rdsim_gazebo rdsim_glim rdsim_interfaces rdsim_localization rdsim_nav2 rdsim_scenario fast_gicp hdl_global_localization hdl_localization ndt_omp |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/auturbo/rdsim.git |
| VCS Type | git |
| VCS Version | devel/2wheel_diff |
| Last Updated | 2025-03-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rdsim_description | 0.0.0 |
| rdsim_gazebo | 0.0.0 |
| rdsim_glim | 0.0.0 |
| rdsim_interfaces | 0.0.0 |
| rdsim_localization | 0.0.0 |
| rdsim_nav2 | 0.0.0 |
| rdsim_scenario | 0.0.0 |
| fast_gicp | 0.0.0 |
| hdl_global_localization | 0.0.0 |
| hdl_localization | 0.0.0 |
| ndt_omp | 0.0.0 |
README
RDSim: Robo Delivery Simulator
Project Page | Video
Summary: RDSim is a Robo Delivery Simulator developed for autonomous delivery systems. It integrates state-of-the-art SLAM, localization, planning, and control technologies within the Gazebo simulation environment. Designed as a comprehensive solution, RDSim supports robot control, environment simulation, and robust navigation capabilities.
1. Environment Settings
There are two ways to execute: ‘Manual Installation && build’ or ‘Docker Installation’
RDSim clone
First of all, we need to clone this project before that.
$ cd ~/ros2_ws/src
$ git clone --recursive https://github.com/AuTURBO/RDSim.git
$ cd ~/ros2_ws/src/RDSim/ && git submodule update --remote
1.1. Manual Installation && build
Requirements
Setting GAZEBO_RESOURCE_PATH
echo "export GAZEBO_RESOURCE_PATH=/usr/share/gazebo-11:$GAZEBO_RESOURCE_PATH" >> ~/.bashrc
source ~/.bashrc
Install dependency
$ sudo apt-get update && sudo apt install -y \
ros-humble-robot-localization \
ros-humble-imu-filter-madgwick \
ros-humble-controller-manager \
ros-humble-diff-drive-controller \
ros-humble-interactive-marker-twist-server \
ros-humble-joint-state-broadcaster \
ros-humble-joint-trajectory-controller \
ros-humble-joint-state-publisher-gui \
ros-humble-joy \
ros-humble-robot-state-publisher \
ros-humble-teleop-twist-joy \
ros-humble-twist-mux \
libgazebo-dev \
ros-humble-spatio-temporal-voxel-layer \
ros-humble-pcl-ros \
ros-humble-pcl-conversions \
ros-humble-rclcpp-components \
ros-humble-xacro* \
tmux \
tmuxp \
&& echo 'alias start_rdsim="cd ~/ros2_ws/src/RDSim/rdsim_launcher && tmuxp load rdsim_launcher.yaml"' >> ~/.bashrc \
&& echo 'alias end="tmux kill-session && killgazebo"' >> ~/.bashrc \
&& source ~/.bashrc
RDSim build
$ cd ~/ros2_ws && rosdep install --ignore-src --rosdistro humble --from-paths ./src/RDSim/rdsim_submodules/navigation2
$ cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
1.2. Docker Installation
Docker environment tested on Ubuntu 22.04, nvidia
# in rdsim main directory
cd ~/ros2_ws/src/RDSim/docker && ./run_command.sh
# in docker container
cd ~/ros2_ws && colcon build --symlink-install --parallel-workers 8 && source install/local_setup.bash
2. Executing the RDSim with One Line
Launch All Nodes
To start the simulation and launch all necessary nodes, simply execute the following command:
start_rdsim
This command initializes the RDSim environment and starts all relevant processes automatically.
Terminate All Nodes
To terminate all running nodes and clean up resources, use the following
```bash
File truncated at 100 lines see the full file