
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
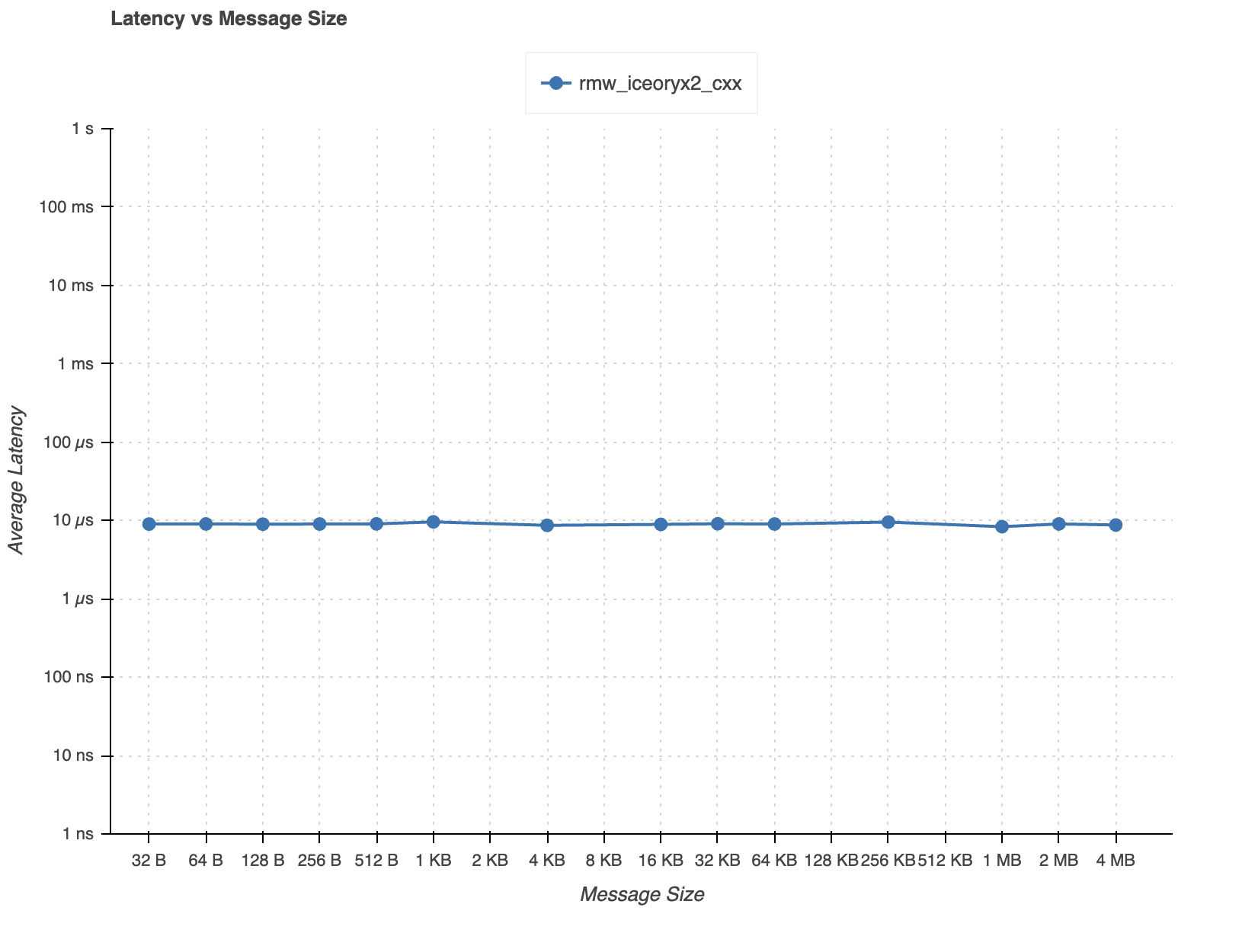
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
rmw_iceoryx2 repositoryrmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes rmw_iceoryx2_cxx_test_msgs |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
``` RMW MIDDLEWARE middleware name : rmw_iceoryx2_cxx
File truncated at 100 lines see the full file