
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
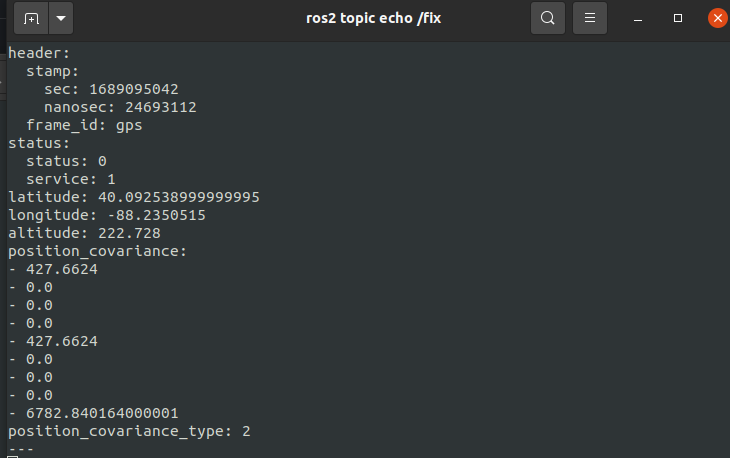
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/gokulp01/ros2-ublox-zedf9p.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-08-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ublox | 2.2.0 |
| ublox_gps | 2.2.0 |
| ublox_msgs | 2.2.0 |
| ublox_serialization | 2.2.0 |
README
Description
This package provides ROS2 support for u-blox ZED F9P GPS receivers. Most of this driver has been written based off the original ROS(1) driver that can be found here. Changes made to support the latest firmware are listed below:
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gps_common/GPSFix messages - Can produce IMU data from receives with SPAN support
Supports:
- Ubuntu 20.04 (Tested)
- Ubuntu 22.04 (Untested)
- ROS2 Foxy and ROS2 Galactic (Tested)
- ROS2 Humble (Untested)
- Colcon
- Firmware 9
Note: This driver has to be installed locally:
mkdir -p ublox_ws/src
cd ublox_ws/src
git clone https://github.com/gokulp01/ros2-ublox-zedf9p.git
cd ..
colcon build
To run the driver:
ros2 launch ublox_gps ublox_gps_node_zedf9p-launch.py
Note: Values are published on /fix topic
Some common errors and how to fix them (this list will be updated as and when new issues are raised).
-
Could NOT find asio (missing: ASIO_INCLUDE_DIR): To fix it, install the asio package on your system.
sudo apt-get install libasio-dev
Source and build again.
Options
The ublox_gps node supports the following parameters for all products and firmware versions:
-
device: Path to the device port. Defaults to/dev/ttyACM0. -
raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only. -
load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
load/mask: uint32_t. Mask of the configurations to load. -
load/device: uint32_t. Mask which selects the devices for the load command.
-
-
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msg-
save/mask: uint32_t. Mask of the configurations to save. -
save/device: uint32_t. Mask which selects the devices for the save command.
-
-
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600. -
uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values. -
frame_id: ROS name prepended to frames produced by the node. Defaults togps. -
rate: Rate in Hz of measurements. Defaults to 4. -
nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1. -
enable_ppp: Enable precise-point-positioning system. Defaults to false. -
gnss/sbas: Enable satellite-based augmentation system. Defaults to false. -
sbas/max: Maximum number of SBAS channels. Defaults to 0. -
sbas/usage: SeeCfgSBASmessage for details. Defaults to 0. -
dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotivesea-
airborne1: Airborne, max acceleration = 1G -
airborne2: Airborne, max acceleration = 2G -
airborne4: Airborne, max acceleration = 4G wristwatch
-
fix_mode: Type of fixes supported:2d,3dorboth. -
dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0. -
dat: Configuring the datum type (optional). See the CfgDAT message.-
dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false. -
dat/majA: Semi-major Axis [m] -
dat/flat: 1.0 / Flattening -
dat/shift: [X-axis, Y-axis, Z-axis] shift [m] -
dat/rot: [X, Y, Z] rotation [s] -
dat/scale: scale change [ppm]
-
For UDR/ADR devices:
-
use_adr: Enable ADR/UDR. Defaults to true. -
nav_rateshould be set to 1 Hz.
For HPG Reference devices:
-
tmode3: Time Mode. Required. See CfgTMODE3 for constants. -
arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed. -
arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed. -
arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.
File truncated at 100 lines see the full file