
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
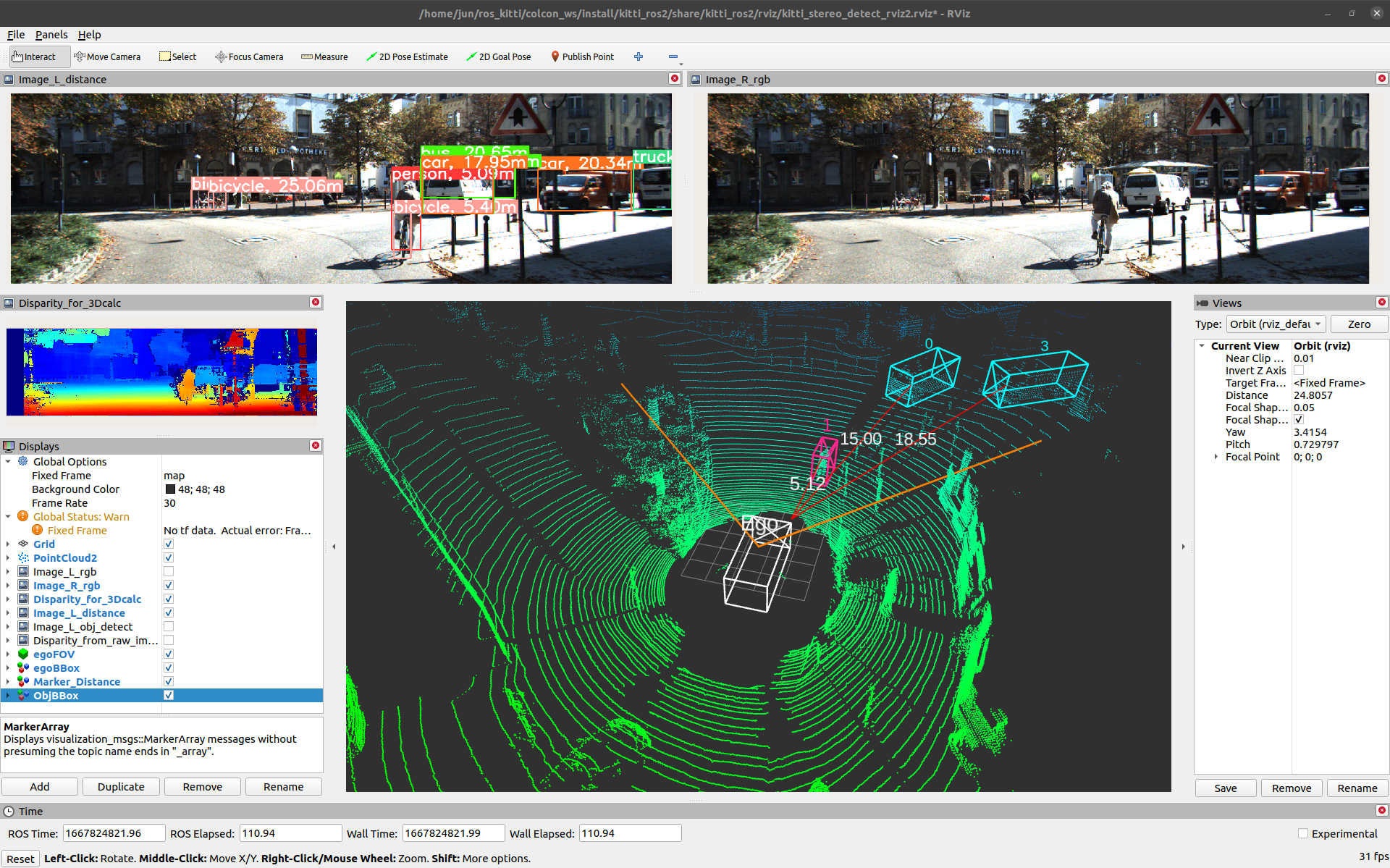
Visualization
Software pipeline
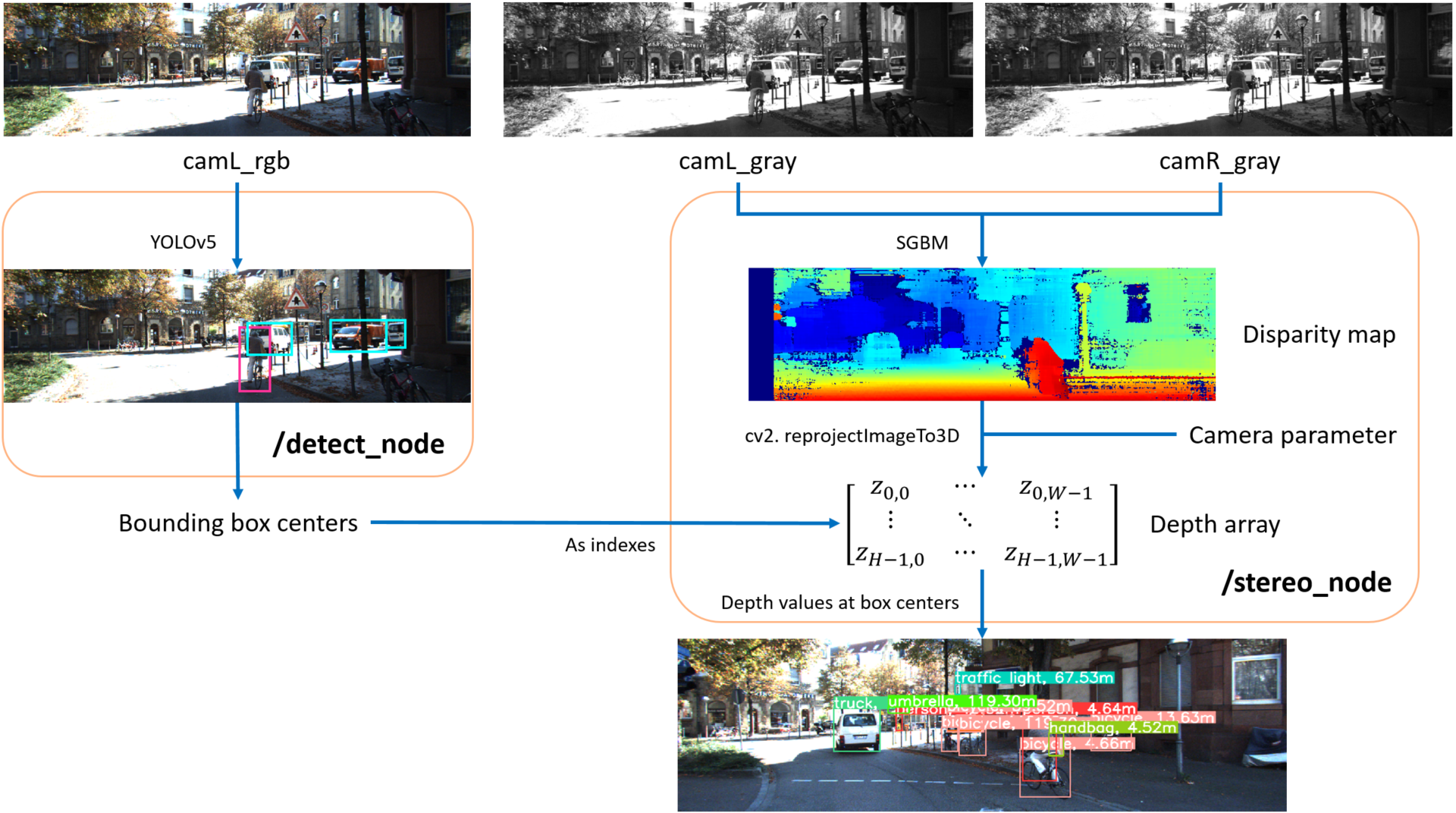
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
Visualization
Software pipeline
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
Visualization
Software pipeline
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
Visualization
Software pipeline
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
Visualization
Software pipeline
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
Visualization
Software pipeline
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
Visualization
Software pipeline
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
Visualization
Software pipeline
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/junmeng6025/ros2_kitti.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| interface | 0.0.0 |
| kitti_ros2 | 0.0.0 |
README
ROS2 + KITTI: Objet detection & Stereo depth estimation
- Visualize raw images and point cloud in ROS2
- Implement object detection algorithm YOLOv5
- Implement stereo depth estimation algorithm SGBM
Visualization
Software pipeline
Software pipeline
Prerequisitions
Install ROS2-galactic
- For ROS2 install follow the official documentation
What if I have to install ROS2 with ROS1 already in my PC?
$\to$ Settings for ROS2 coexistence with ROS1. - Install
tf-transformations
sudo apt-get install ros-galactic-tf-transformations
for other ros2 distors substitude the galactic with your distro name
Build and Run
Clone the repository to local
git clone https://github.com/junmeng6025/ros2_kitti.git
Install libiaries for YOLOv5
cd ros2_kitti
pip install -r requirements.txt
- If you run into errors that claims missing some python libraries, please check
requirements.txtin/colcon_ws/src/kitti_ros2/yolov5. - Or you can use
rosdepto install dependencies automatically. (See belowPossible issues) - Or install the missing libraries according to the error messages …
Download KITTI dataset and extract
see Data preparation
Build the workspace
- use colcon build command to generate executable files automatically
cd ros2_kitti/colcon_ws
! ALWAYS make sure you’ve sourced ROS2 to your current terminal before “colcon build”
source /opt/ros/galactic/setup.bash
colcon build
use the command
echo ${ROS_DISTRO}to check the current ROS distro in your working Terminal
make sure it returnsgalacticor other ROS2 distro
- after build, copy the folder
/datain
/src/kitti_ros2/yolov5
to
/install/kitti_ros2/lib/python3.8/site-packages/yolov5
Launch the nodes
source the setup.sh to current terminal
# stay in the directory /ros2_kitti/colcon_ws
source install/setup.sh
ros2 launch kitti_ros2 kitti_stereo_detect.launch.py
There are two other options:
- B: Visualize KITTI data in Rviz without detection or depth estimation
ros2 launch kitti_ros2 kitti_visualization.launch.py
- C: Implement the detection but without depth estimation
ros2 launch kitti_ros2 kitti_detect.launch.py
Possible issues:
1) Coexist ROS1 and ROS2
Settings for ROS2 coexistence with ROS1.
2) Use rosdep or rosdepc (‘c’ for Chinese)
File truncated at 100 lines see the full file