
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
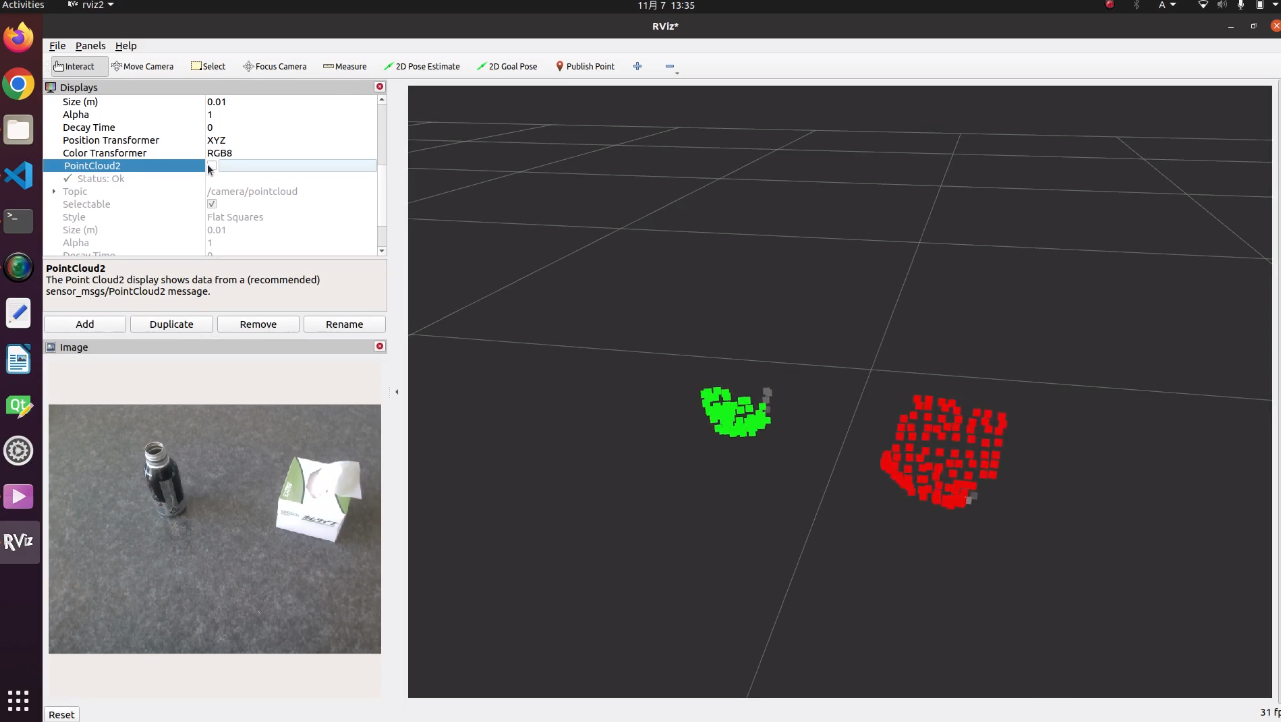
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
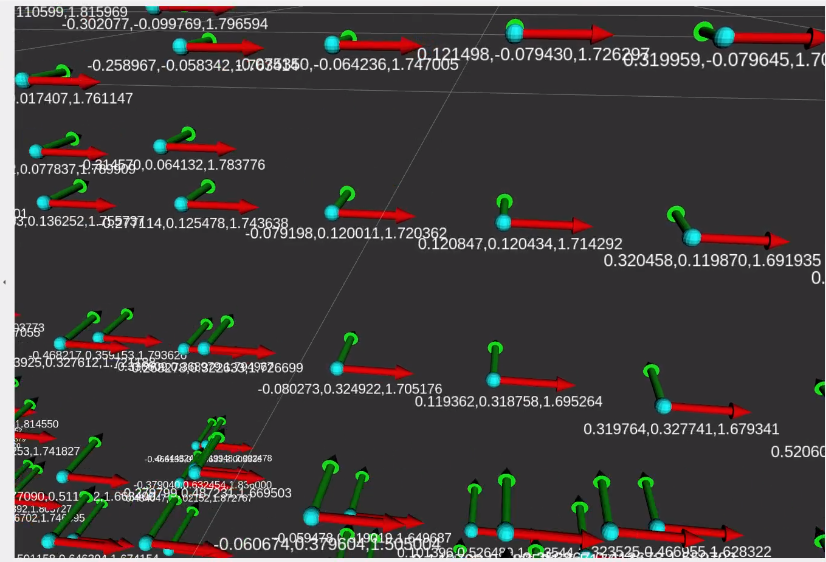
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_rs_pcl | 0.0.0 |
README
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.