
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
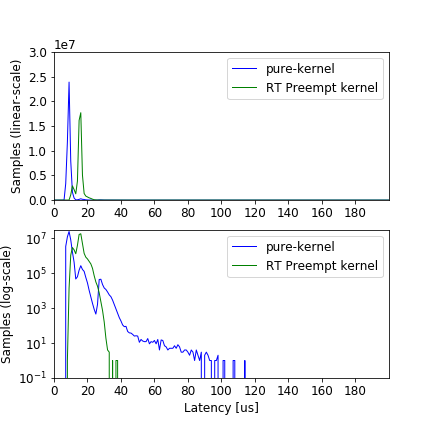
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros2_timer_latency_measurement | 0.0.0 |
README
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file