
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
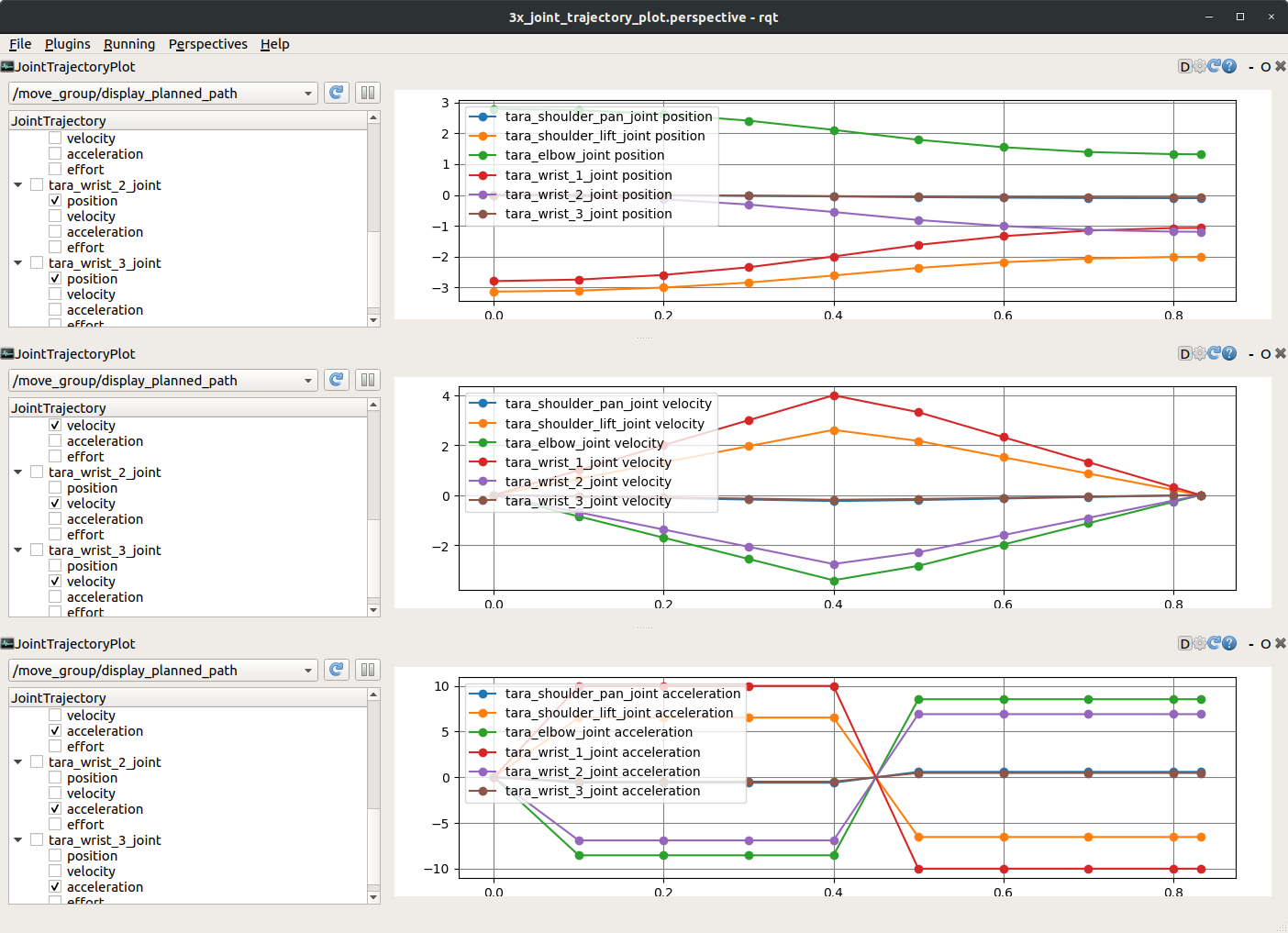
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
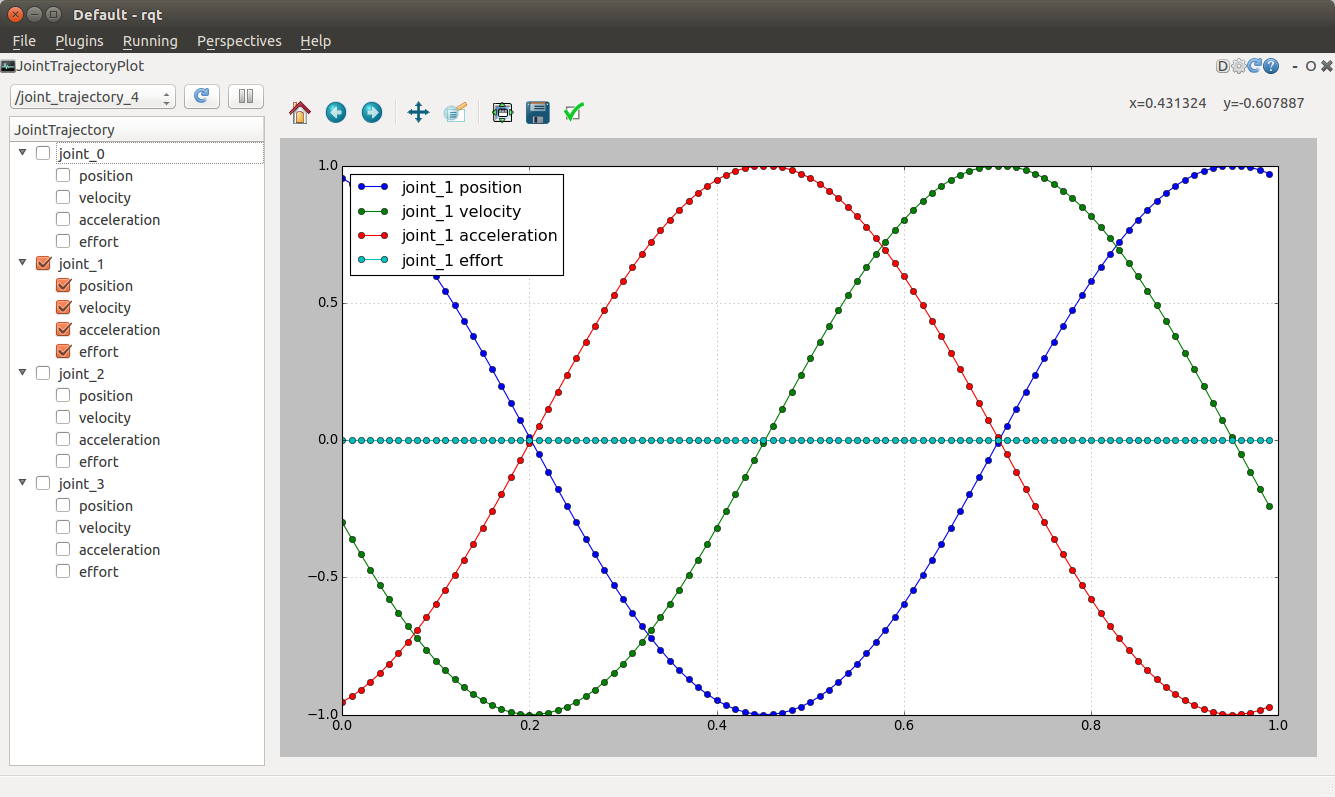
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_joint_trajectory_plot | 0.0.5 |
README
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the ‘Plugins’->’Visualization’->’JointTrajectoryPlot’
If you don’t have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don’t see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.