
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 1.0.3 |
README
No README found.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 2.0.0 |
README
No README found.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | kilted |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 3.0.0 |
README
No README found.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2025-09-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 4.0.2 |
README
RQT Robot Steering
This package contains the rqt_robot_steering node, an RQT plugin which publishes a Twist (or TwistStamped) containing X linear and Z angular velocities.
This is intended for 2D navigation scenarios.
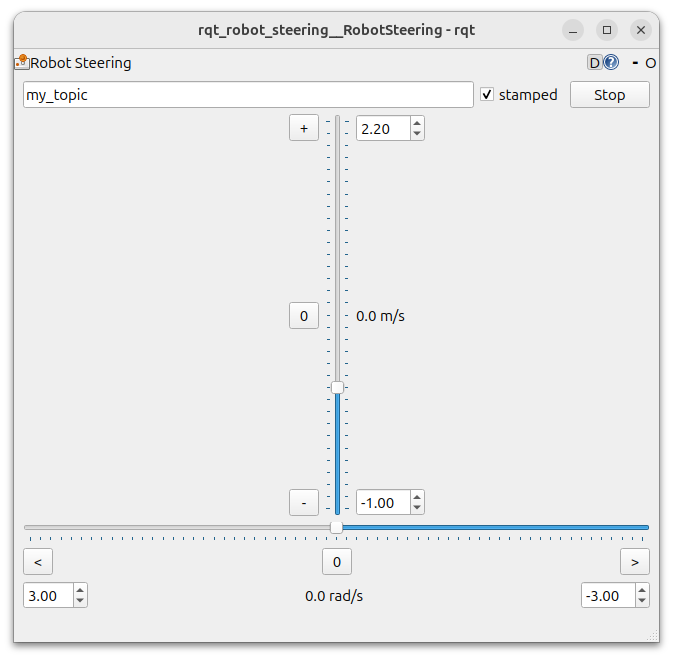
Settings like the topic name and window size are saved to and restored from ~/.config/ros.org/rqt_gui.ini.
Example
ros2 run rqt_robot_steering rqt_robot_steering --ros-args -p default_topic:=my_topic -p default_stamped:=true -p default_vx_max:=2.2
Published Topics
By default, publisheds to /cmd_vel.
The topic name can be changed in the GUI, and will be saved/restored if the GUI is closed cleanly (not Ctrl+C).
You can override this topic name using ROS parameters.
Parameters
-
default_topic(string) - The topic name to publish on -
default_stamped(bool) - Whether to publishTwistorTwistStamped -
default_vx_min(double) - The minimum X velocity in m/s, used by the vertical slider. -
default_vx_max(double) - The maximum X velocity in m/s, used by the vertical slider. -
default_vw_min(double) - The minimum Z velocity in rad/s, used by the horizontal slider. -
default_vw_max(double) - The maximum Z velocity in rad/s, used by the horizontal slider.
CONTRIBUTING
Any contribution that you make to this repository will be under the 3-Clause BSD License, as dictated by that license.
No version for distro github showing humble. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 1.0.3 |
README
No README found.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2025-07-23 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 1.0.2 |
README
No README found.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2025-07-23 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 1.0.2 |
README
No README found.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-10-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 0.5.12 |
README
No README found.
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2025-04-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rqt_robot_steering | 0.5.14 |
README
No README found.