
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
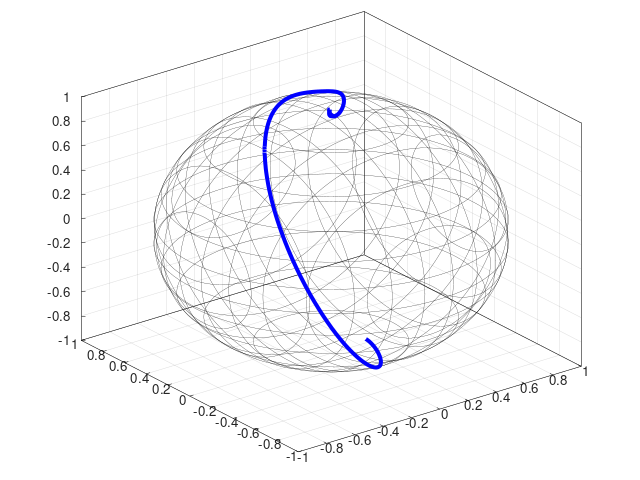
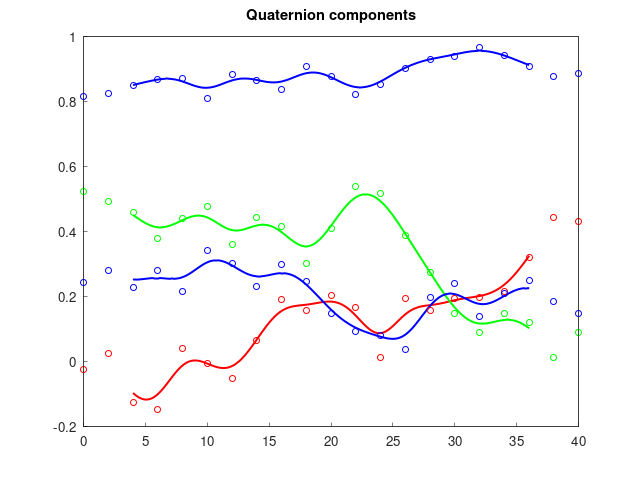
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
, see
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
memory representation
- smooth::SO3: three-dimensional rotations with quaternion
memory representation
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
as a single Lie group. The Bundle type also supports regular Eigen vectors as
components
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
- smooth::SO3: three-dimensional rotations with quaternion
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
- smooth::SO3: three-dimensional rotations with quaternion
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
- smooth::SO3: three-dimensional rotations with quaternion
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
- smooth::SO3: three-dimensional rotations with quaternion
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
- smooth::SO3: three-dimensional rotations with quaternion
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
- smooth::SO3: three-dimensional rotations with quaternion
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
- smooth::SO3: three-dimensional rotations with quaternion
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/pettni/smooth.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| smooth | 0.0.1 |
README
Lie Theory for Robotics
[![CI Build and Test][ci-shield]][ci-link] [![Code coverage][cov-shield]][cov-link] [![License][license-shield]][license-link]
- Requirements: C++20, Eigen 3.4
- [Documentation][doc-link]
- Compatible with: autodiff, boost::numeric::odeint, Ceres, ROS
- Written in an extensible functional programming style
In robotics it is often convenient to work in non-Euclidean manifolds. Lie groups are a class of manifolds that are easy to work with due to their symmetries, and that are also good models for many robotic systems. This header-only C++20 library facilitates leveraging Lie theory in robotics software, by enabling:
- Algebraic manipulation
- Automatic differentiation
- Interpolation (right figure shows a B-spline of order 5 on smooth::SO3, see
examples/bspline.cpp) - Numerical integration (left figure shows the solution of an ODE on
examples/odeint.cpp) - Optimization
The following common Lie groups are implemented:
- smooth::SO2: two-dimensional rotations with complex number
- smooth::SO3: three-dimensional rotations with quaternion
- smooth::SE2: two-dimensional rigid motions
- smooth::SE3: three-dimensional rigid motions
- smooth::C1: complex numbers (excluding zero) under multiplication
- smooth::Galilei: the Galilean group. It includes SE_2(3) as a special case.
- smooth::SE_K_3: generalization of SE3 with multiple translations
- A smooth::Bundle type to treat Lie group products
- Lie group interfaces for Eigen vectors and builtin scalars
Getting started
Download and Build
Clone the repository and install it
git clone https://github.com/pettni/smooth.git
cd smooth
mkdir build && cd build
# Specify a C++20-compatible compiler if your default does not support C++20.
# Build tests and/or examples as desired.
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTS=OFF
make -j8
sudo make install
Alternatively, if using ROS or ROS2 just clone smooth into a
catkin/colcon workspace source folder and build the
workspace with a compiler that supports C++20. Example with colcon:
colcon build --cmake-args -DCMAKE_CXX_COMPILER=/usr/bin/g++-10
Use with cmake
To utilize smooth in your own project, include something along these lines in your CMakeLists.txt
find_package(smooth)
add_executable(my_executable main.cpp)
target_link_libraries(my_executable smooth::smooth)
Explore the API
Check out the [Documentation][doc-link] and the examples.
Using the library
Algebraic Manipulations
```cpp // Also works with other types: SO2d, SE2d, SE3d, Bundle<SO3d, T3d> etc…
using Tangent = typename smooth::SO3d::Tangent;
// construct a random group element and a random tangent element smooth::SO3d g = smooth::SO3d::Random(); Tangent a = Tangent::Random();
// lie group exponential auto exp_a = smooth::SO3d::exp(a);
// lie group logarithm auto g_log = g.log();
// lie algebra hat and vee maps auto a_hat = smooth::SO3d::hat(a); auto a_hat_vee = smooth::SO3d::vee(a_hat);
// group adjoint
File truncated at 100 lines see the full file