
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
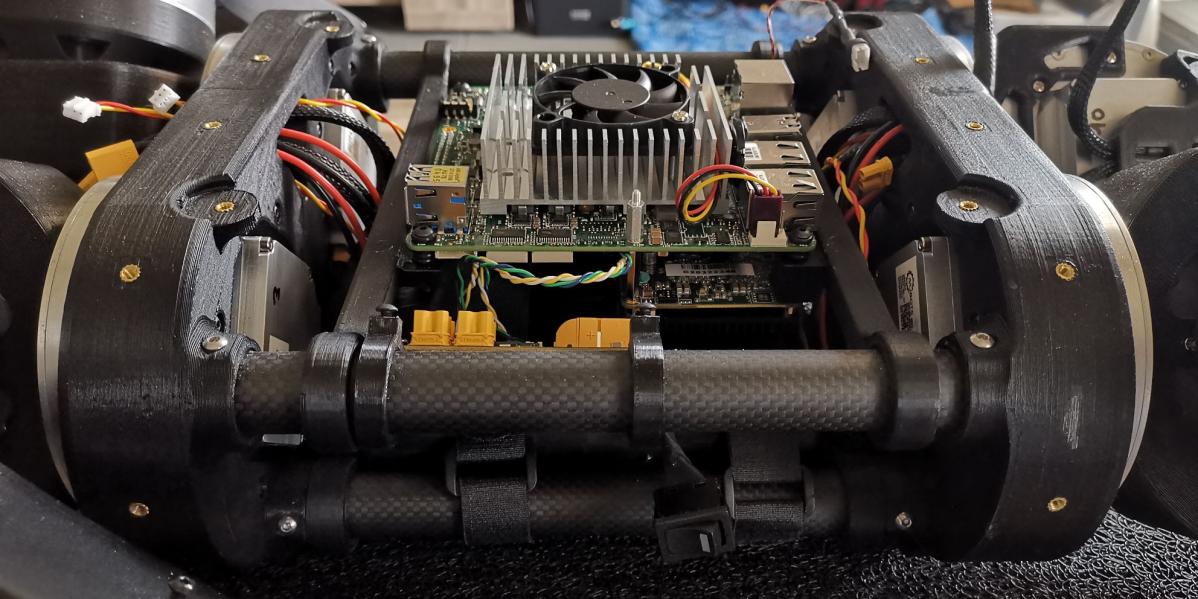
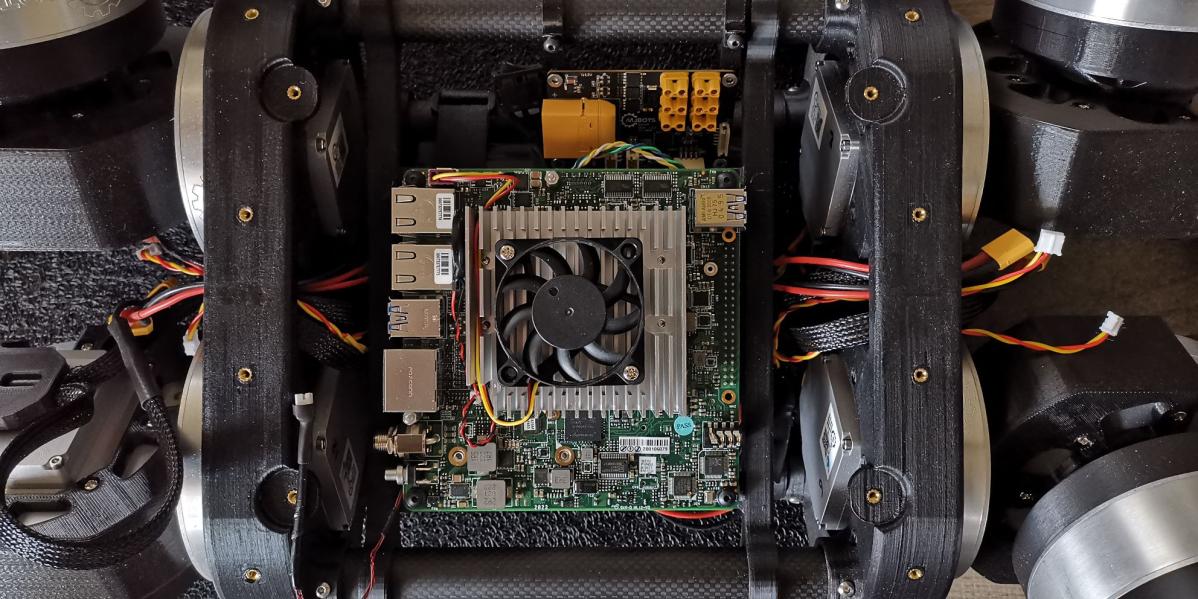
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots

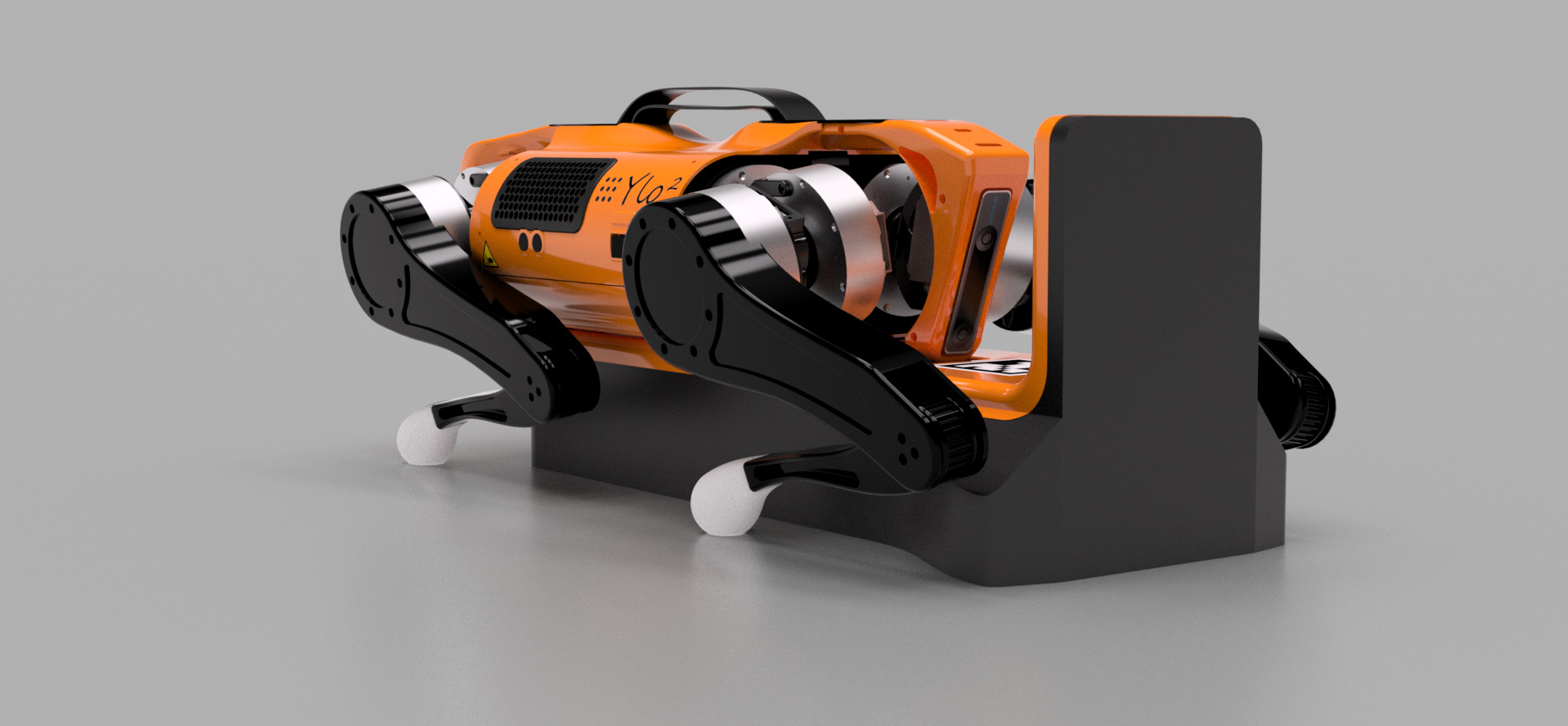


This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat

upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
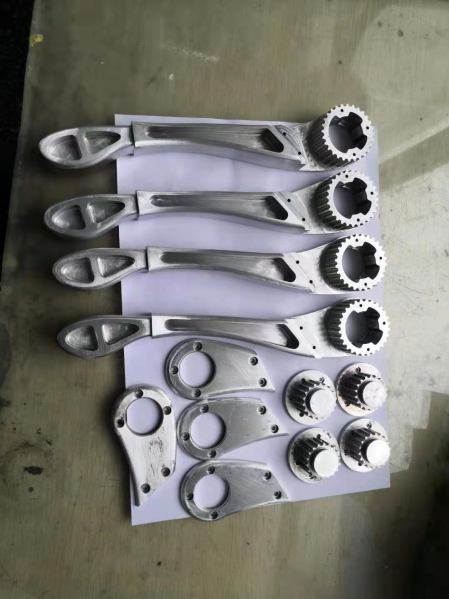



Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
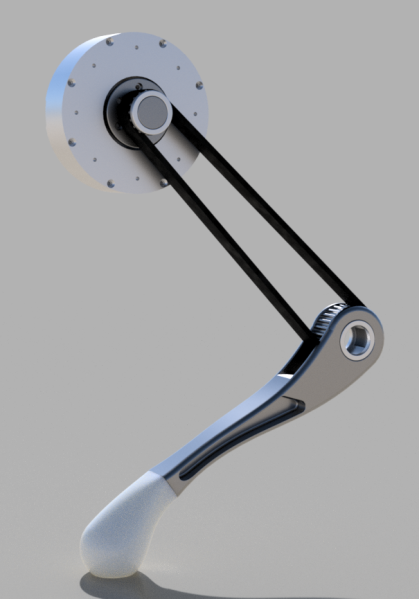
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change


3D calibration tool, for all 4 legs


WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots
This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat
upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change
3D calibration tool, for all 4 legs
WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots
This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat
upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change
3D calibration tool, for all 4 legs
WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots
This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat
upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change
3D calibration tool, for all 4 legs
WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots
This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat
upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change
3D calibration tool, for all 4 legs
WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots
This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat
upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change
3D calibration tool, for all 4 legs
WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots
This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat
upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change
3D calibration tool, for all 4 legs
WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots
This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat
upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change
3D calibration tool, for all 4 legs
WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/elpimous/ylo-2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-04-30 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ylo2_moteus | 0.1.0 |
| k3lso_moteus | 0.1.0 |
| aliengo_description | 0.0.1 |
| anymal_description | 0.0.1 |
| anymalc_description | 1.0.2 |
| hyq_description | 0.0.1 |
| kinova_description | 0.0.1 |
| minicheetah_description | 0.0.1 |
| sensors_description | 0.0.1 |
| solo_description | 0.0.1 |
| spot_description | 0.0.1 |
| wolf_description_utils | 0.0.1 |
| ylo2_description | 0.0.1 |
| champ | 0.1.0 |
| champ_base | 0.1.0 |
| champ_bringup | 0.1.0 |
| champ_config | 0.1.0 |
| champ_description | 0.1.0 |
| champ_gazebo | 0.1.0 |
| champ_msgs | 0.1.0 |
| champ_navigation | 0.1.0 |
| ylo2_config | 0.1.0 |
README
ylo-2
New quadruped robot, working on UP Xtreme board, and BLDC motors from Mjbots
This robot is created from scratch.
The body structure is 3D printed + 1mm carbon tubes
Bec 12v @ 5A (7A peak)
all covers are 3D printed, sanded, painted and coated with a 2K coat
upper and lower legs are Made with ALU 7075, using the CNC process
transmission is done thanks to a timing belt 550 teeth GT3
Both pulleys are alu CNC.
Lower leg has a 3/1 ratio (and motor provides a 6/1 ratio)
foot are silicon made in a 3d printed mold, inserted in force, as a sock…easy to change
3D calibration tool, for all 4 legs
WORKING PROCESS :
-
Finish robot
-
RT kernel on 18.04 é 20.04
-
Peak 4 can working
-
Realsense D435
-
Realsense T265
-
Myahrs+ IMU
-
Ros noetic
-
I2C working on UP Xtreme I7
-
Distance sensors SRF10
-
URDF
-
Champ Moteus controller (position mode)
-
Improving gait
-
DockStation RTH software
-
VSLAM, GMAPPING and AMCL