
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
 |
|---|
| Frame v2.2 CAD design. |
 |
|---|
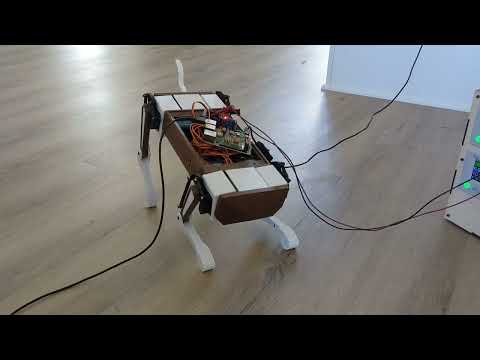
| Zuko himself! |
 |
|---|
| Frame v2.1 parts printed. |
 |
|---|
| Expansion board v1 for direct RPi inteface. |
 |
|---|
| Frame v2.1 first time standing. |
 |
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
 |
|---|
| Video: frame v2.1 first tests |
 |
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/
CONTRIBUTING
|
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
|
|---|
| Frame v2.2 CAD design. |
|
|---|
| Zuko himself! |
|
|---|
| Frame v2.1 parts printed. |
|
|---|
| Expansion board v1 for direct RPi inteface. |
|
|---|
| Frame v2.1 first time standing. |
|
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
|
|---|
| Video: frame v2.1 first tests |
|
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/
CONTRIBUTING
|
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
|
|---|
| Frame v2.2 CAD design. |
|
|---|
| Zuko himself! |
|
|---|
| Frame v2.1 parts printed. |
|
|---|
| Expansion board v1 for direct RPi inteface. |
|
|---|
| Frame v2.1 first time standing. |
|
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
|
|---|
| Video: frame v2.1 first tests |
|
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/
CONTRIBUTING
|
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
|
|---|
| Frame v2.2 CAD design. |
|
|---|
| Zuko himself! |
|
|---|
| Frame v2.1 parts printed. |
|
|---|
| Expansion board v1 for direct RPi inteface. |
|
|---|
| Frame v2.1 first time standing. |
|
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
|
|---|
| Video: frame v2.1 first tests |
|
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/
CONTRIBUTING
|
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
|
|---|
| Frame v2.2 CAD design. |
|
|---|
| Zuko himself! |
|
|---|
| Frame v2.1 parts printed. |
|
|---|
| Expansion board v1 for direct RPi inteface. |
|
|---|
| Frame v2.1 first time standing. |
|
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
|
|---|
| Video: frame v2.1 first tests |
|
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/
CONTRIBUTING
|
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
|
|---|
| Frame v2.2 CAD design. |
|
|---|
| Zuko himself! |
|
|---|
| Frame v2.1 parts printed. |
|
|---|
| Expansion board v1 for direct RPi inteface. |
|
|---|
| Frame v2.1 first time standing. |
|
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
|
|---|
| Video: frame v2.1 first tests |
|
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/
CONTRIBUTING
|
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
|
|---|
| Frame v2.2 CAD design. |
|
|---|
| Zuko himself! |
|
|---|
| Frame v2.1 parts printed. |
|
|---|
| Expansion board v1 for direct RPi inteface. |
|
|---|
| Frame v2.1 first time standing. |
|
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
|
|---|
| Video: frame v2.1 first tests |
|
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/
CONTRIBUTING
|
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
|
|---|
| Frame v2.2 CAD design. |
|
|---|
| Zuko himself! |
|
|---|
| Frame v2.1 parts printed. |
|
|---|
| Expansion board v1 for direct RPi inteface. |
|
|---|
| Frame v2.1 first time standing. |
|
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
|
|---|
| Video: frame v2.1 first tests |
|
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/
CONTRIBUTING
|
|
zuko repositoryquad_gamepad quad_interfaces quad_main quad_motors quad_output quad_sensors quad_simulation quad_urdf |
ROS Distro
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/reubenstr/zuko.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| quad_gamepad | 0.0.0 |
| quad_interfaces | 0.0.0 |
| quad_main | 0.0.1 |
| quad_motors | 0.0.0 |
| quad_output | 0.0.0 |
| quad_sensors | 0.0.0 |
| quad_simulation | 0.0.0 |
| quad_urdf | 0.0.0 |
README
Zuko - A quadruped robot dog!
|
|---|
| Frame v2.2 CAD design. |
|
|---|
| Zuko himself! |
|
|---|
| Frame v2.1 parts printed. |
|
|---|
| Expansion board v1 for direct RPi inteface. |
|
|---|
| Frame v2.1 first time standing. |
|
|---|
| Frame v2.1 upper leg’s servo horn, linked leg bridge, and bridge bearing press fit together. |
|
|---|
| Video: frame v2.1 first tests |
|
|---|
| Video: Sydney meets Zuko |
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
- Complete ROS2 tasks - in progress
- Fab/test expansion-board PCB
- Update BOM
- Create PCB BOM
- Upload STL’s
- Create print time/weight sheet
- Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
- Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
- Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
- Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
- Parameterized duplicated hard-coded values.
- Created servo calibration script for quicker calibration and servo support.-
- A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
- 8x 18650 user accessable battery holder with onboard BMS (battery management system).
Credits
- Simulation, kinematics, bezier curves, and machine learning are largely based on the work from Spot Mini Mini: https://github.com/OpenQuadruped/spot_mini_mini
- Spot Mini Mini is based on SpotMicroAI: https://spotmicroai.readthedocs.io/en/latest/
- Frame and leg linkage design inspired by Baris Alp’s Kangel robot dog: https://grabcad.com/library/diy-quadruped-robot-1
Communities
- SpotMicroAI Discord: https://discord.gg/m5fsENhT
- Quadrupedalism: https://quadrupedalism.com/