
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
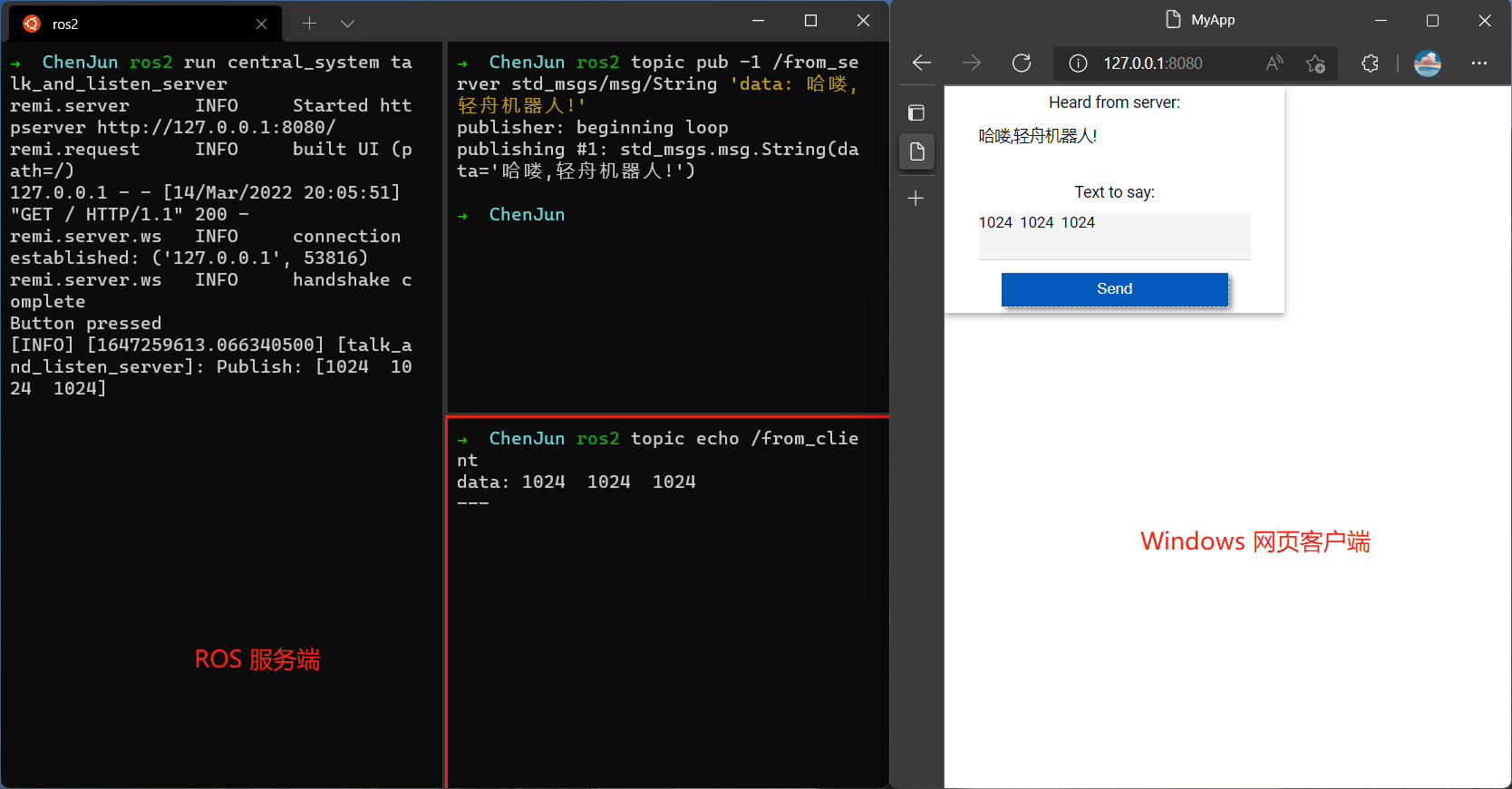
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged central_system at Robotics Stack Exchange
|
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged central_system at Robotics Stack Exchange
|
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged central_system at Robotics Stack Exchange
|
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged central_system at Robotics Stack Exchange
|
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged central_system at Robotics Stack Exchange
|
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged central_system at Robotics Stack Exchange
|
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged central_system at Robotics Stack Exchange
|
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged central_system at Robotics Stack Exchange
|
|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- chenjun
Authors
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client