
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
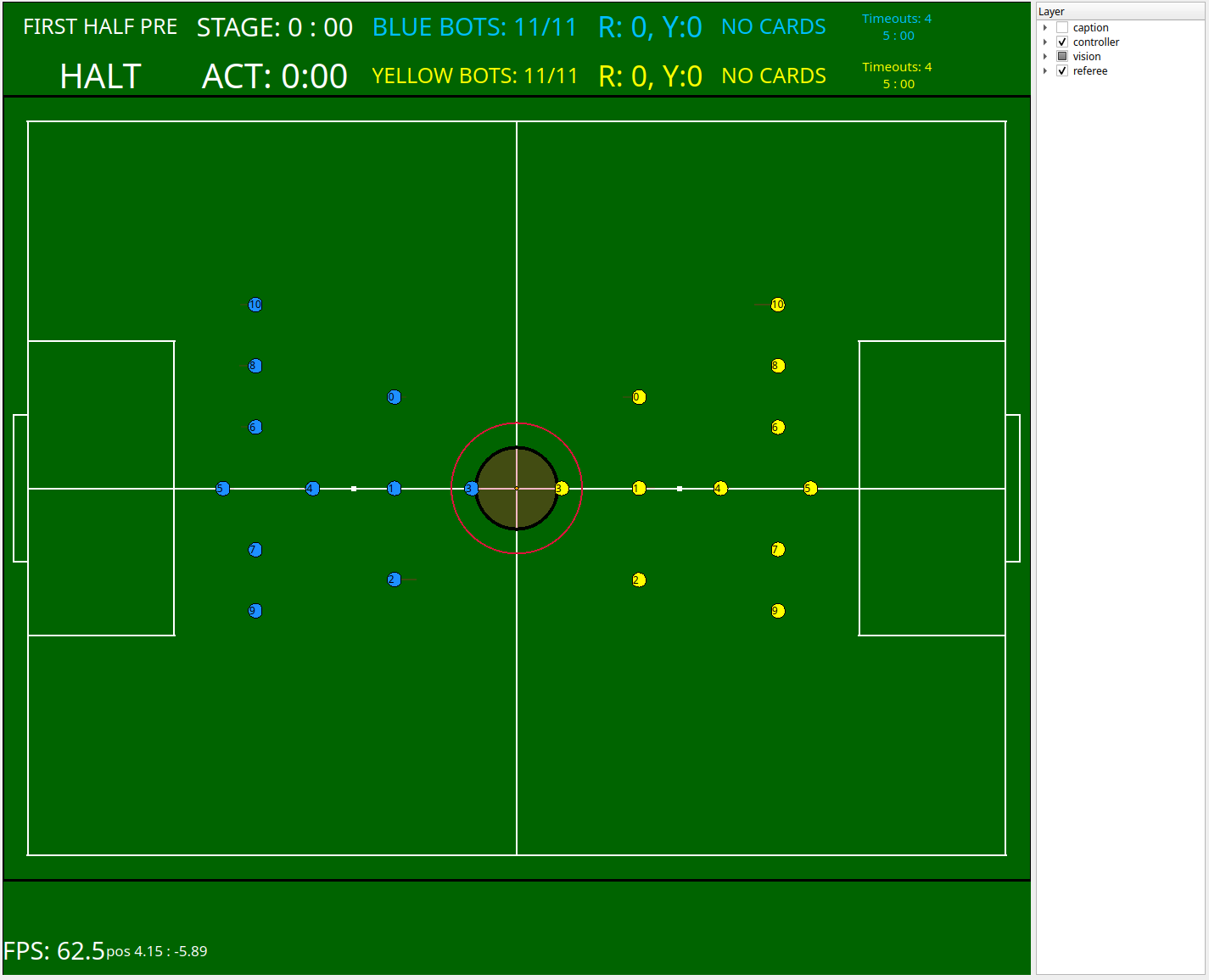
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |
Launch files
Messages
Services
Plugins
Recent questions tagged consai_examples at Robotics Stack Exchange
|
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |
Launch files
Messages
Services
Plugins
Recent questions tagged consai_examples at Robotics Stack Exchange
|
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |
Launch files
Messages
Services
Plugins
Recent questions tagged consai_examples at Robotics Stack Exchange
|
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |
Launch files
Messages
Services
Plugins
Recent questions tagged consai_examples at Robotics Stack Exchange
|
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |
Launch files
Messages
Services
Plugins
Recent questions tagged consai_examples at Robotics Stack Exchange
|
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |
Launch files
Messages
Services
Plugins
Recent questions tagged consai_examples at Robotics Stack Exchange
|
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |
Launch files
Messages
Services
Plugins
Recent questions tagged consai_examples at Robotics Stack Exchange
|
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |
Launch files
Messages
Services
Plugins
Recent questions tagged consai_examples at Robotics Stack Exchange
|
|
consai_examples package from consai_ros2 repoconsai consai_description consai_examples consai_game consai_msgs consai_referee_parser consai_robot_control_utils consai_robot_controller consai_tools consai_vision_tracker consai_visualizer consai_visualizer_msgs robocup_ssl_comm robocup_ssl_msgs |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ssl-roots/consai_ros2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- shotaak
Authors
consai_examples
CON-SAIの使い方がわかるチュートリアルパッケージです。
Robocup SSLソフトウェアの設定
Vision(SSL-Vision、grSim)、Referee(SSL Game Controller)、Sim(grSim) のデータ配信先アドレスとポートを設定します。
- Vision
- アドレス: 224.5.23.2
- ポート: 10006
- Referee
- アドレス: 224.5.23.1
- ポート: 10003
- Sim
- アドレス: 127.0.0.1
- ポート: 20011
consai_vision_trackerでビジョンの情報を取得する
次のコマンドを実行します。
ros2 launch consai_examples start.launch.py
ビジュアライザが起動し、ビジョンの情報が表示されます。
ウィンドウ右側にあるLayerの各項目にチェックを入れることで、 表示コンテンツをON/OFFできます。
consai_robot_controllerでロボットを動かす
次のコマンドを実行します。 このコマンドは、ビジュアライザだけでなくロボットコントローラも起動します。
ros2 launch consai_examples start.launch.py
別のターミナルで、pythonスクリプトを実行します。
ros2 run consai_examples control.py
解説
control.pyはconsai_robot_controllerの使い方を知るためのスクリプトです。
引数のexampleをセットするとロボットの動きを変更できます。
# ヘルプの表示
ros2 run consai_examples control.py --help
...
--example EXAMPLE 実行したい関数の番号
0: move_to
1: chase_ball
2: wait_ball_and_shoot
3: receive_ball_and_shoot
4: pass_ball_between_robots
5: move_to_between_ball_and_center
6: defend_our_goal
# 2: wait_ball_and_shootを実行
ros2 run consai_examples control.py --example=2
ロボット、ボール情報を上下左右反転する
consai_visition_trackerのinvertパラメータをTrueにすると、
ロボットとボールの情報を上下左右反転できます。
これは、試合プログラムを変更しなくてもコートチェンジできるため便利です。
次のようにコマンドを実行すると、’invert’パラメータを’True’にできます。
```sh
引数invert:=trueを追加
ros2 launch consai_examples start.launch.py invert:=true
ロボットを動かす
ros2 run consai_examples control.py
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_pytest | |
| ament_uncrustify | |
| ament_cpplint | |
| consai_msgs | |
| consai_tools | |
| launch_ros | |
| rclpy |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| consai |