
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.

Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
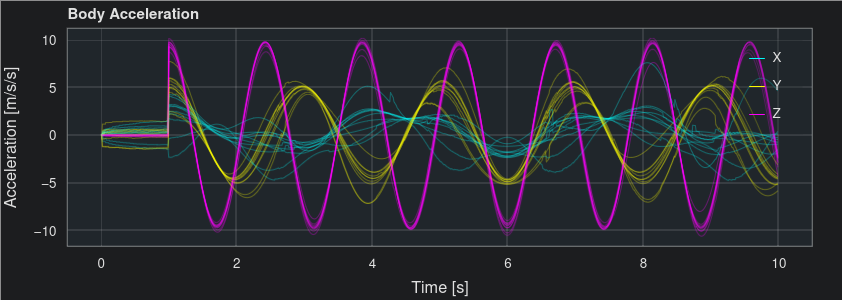
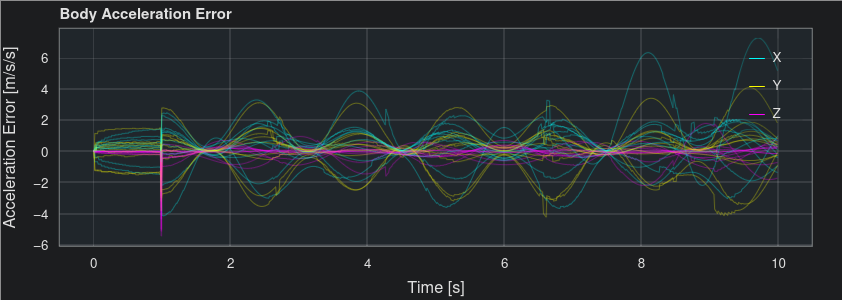
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ekf_cal at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.
Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ekf_cal at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.
Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ekf_cal at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.
Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ekf_cal at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.
Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ekf_cal at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.
Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ekf_cal at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.
Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ekf_cal at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.
Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ekf_cal at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.4.0 |
| License | GPLv3 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Extended Kalman Filter-Based Calibration and Localization |
| Checkout URI | https://github.com/unmannedlab/ekf_cal.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-29 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- jacob
Authors
ekf_cal
![]()
Extended Kalman Filter Calibration and Localization: ekf_cal is a package focused on the simulation and development of a multi-sensor online calibration kalman filter. It combines the architecture of a Multi-State Constraint Kalman Filter (MSCKF) with a multi-sensor calibration filter to provide intrinsic and extrinsic estimates for the following sensors:
The full project documentation is available online.
Quick Start
Clone the Repository
This guide assumes you have the ekf_cal repository in a colcon workspace.
mkdir ekf_cal_ws/
mkdir ekf_cal_ws/src/
cd ekf_cal_ws/src/
git clone git@github.com:unmannedlab/ekf_cal.git
cd ../
Dependencies
The ekf_cal package has the following hard dependencies that are required for all compilations:
The following dependencies are for building the ROS node and simulation, respectively
The following soft dependencies useful for development and documentation
These can be installed by running rosdep in the base directory of the colcon workspace (e.g. ekf_cal_ws)
rosdep install --from-paths src -y --ignore-src
Build
Building can be done simply with the following command:
colcon build --symlink-install --packages-select ekf_cal --event-handlers console_cohesion+ --cmake-args -DCMAKE_BUILD_TYPE=Release
Docker
Alternatively, a Dockerfile is provided, which can be used either inside a VS Code devcontainer, or a standalone container.
Input Files
This repository offers two main ways to utilize the Kalman filter framework: a simulation and ROS2 node. Both the simulation and ROS node are configurable and runnable using identically formatted YAML files. Further documentation on how to configure this YAML file for a particular setup can be found on the Parameters page.
Simulation
Simulations can be run using a YAML configuration file that extends the base configuration file with additional parameters. See the example example.yaml. Multiple simulations can be run in parallel using the run.py. An example using a single input is given below
python3 eval/run.py config/example.yaml
The results of a run can be plotted using report.py
python3 eval/report.py config/example.yaml
To run and plot in sequence, utilize evaluate.py
python3 eval/evaluate.py config/example.yaml
This will generate and run the requested number of simulation runs for the specified run time and produce plots of the Monte Carlo data. For example, the report generates plots of the body acceleration estimates and the true error in those acceleration estimates.
Launch ROS2 Node
For an example of a filter node launch file, see example.launch.py
In particular, note the configuration file example.yaml.
The configuration file specifies which sensor topics should to use and the initialization values. Once built, the ROS node can be started by running the following command
ros2 launch example.launch
Evaluating the output of the ROS node is the same as with the simulations, where reports can be generated using the resultant log files.
Testing & Static Analysis
Once the package has been built, unit tests and static analysis can be run with the following commands
```
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_gtest | |
| cv_bridge | |
| geometry_msgs | |
| rclcpp | |
| sensor_msgs | |
| std_msgs | |
| tf2_geometry_msgs |