
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
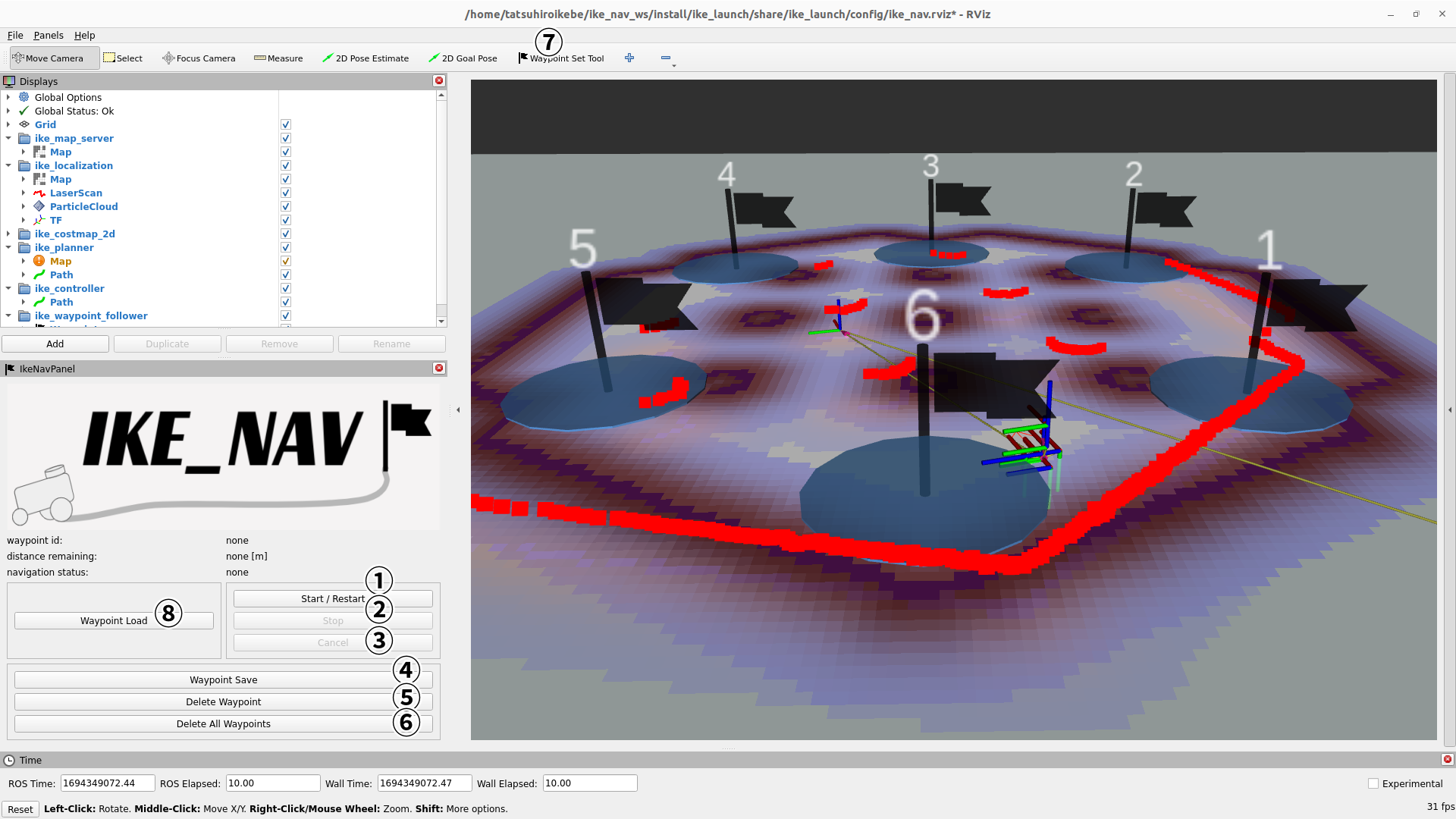
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
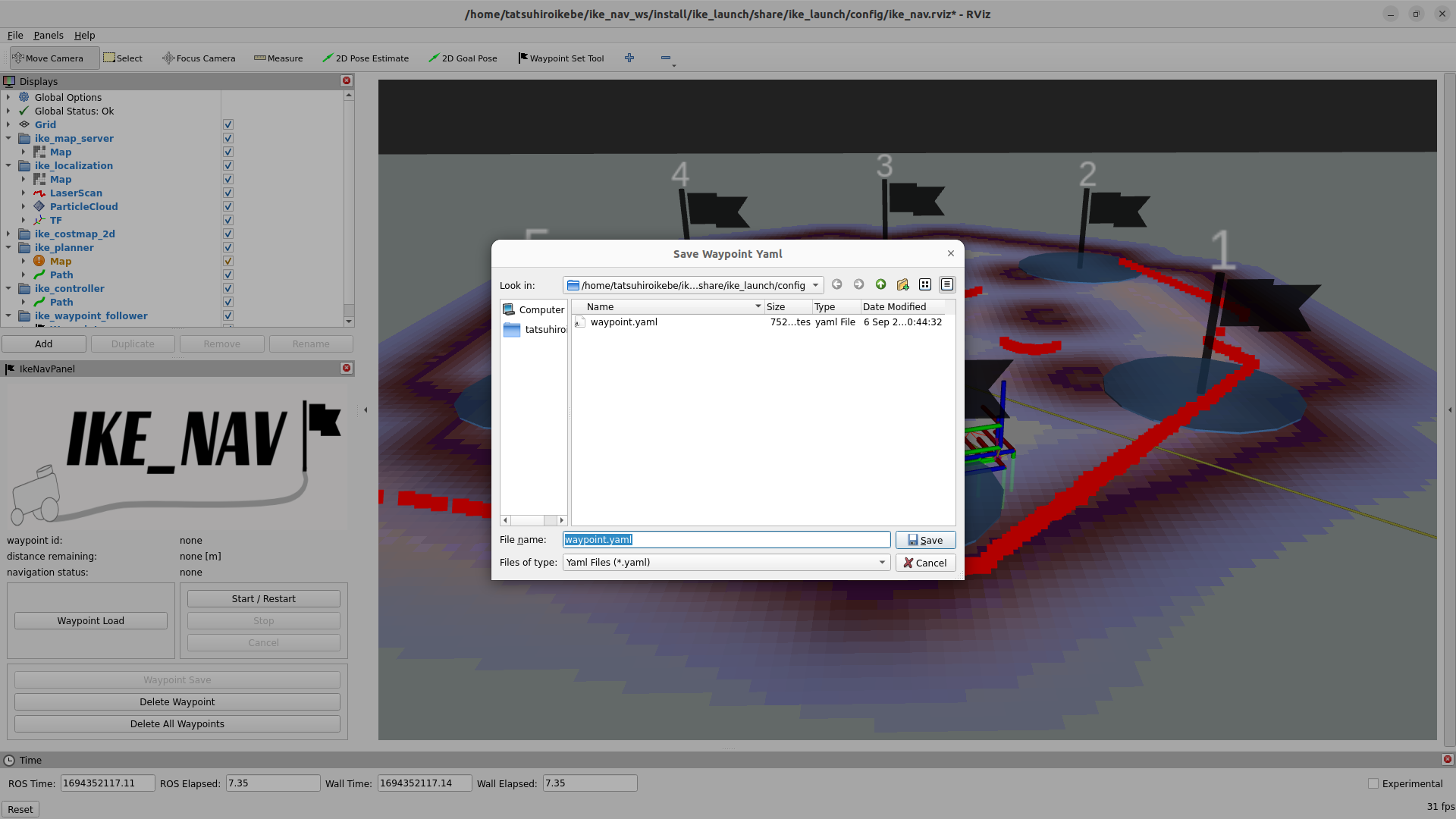
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
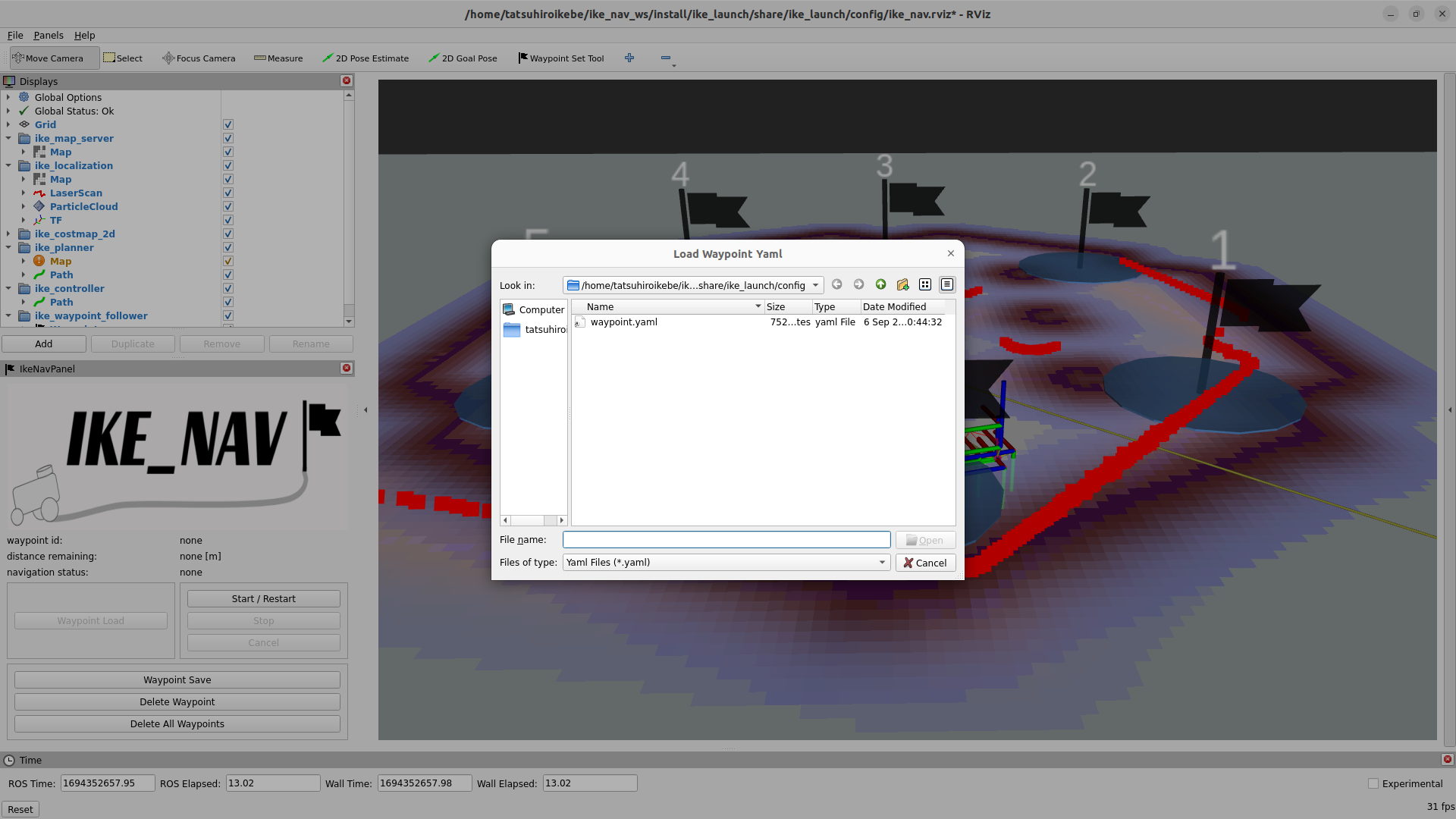
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ike_nav_rviz_plugins at Robotics Stack Exchange
|
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ike_nav_rviz_plugins at Robotics Stack Exchange
|
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ike_nav_rviz_plugins at Robotics Stack Exchange
|
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ike_nav_rviz_plugins at Robotics Stack Exchange
|
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ike_nav_rviz_plugins at Robotics Stack Exchange
|
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ike_nav_rviz_plugins at Robotics Stack Exchange
|
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ike_nav_rviz_plugins at Robotics Stack Exchange
|
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ike_nav_rviz_plugins at Robotics Stack Exchange
|
|
ike_nav_rviz_plugins package from ike_nav repoike_controller ike_costmap_2d ike_launch ike_localization ike_map_server ike_nav ike_nav_msgs ike_nav_parameters ike_nav_rviz_plugins ike_nav_server ike_planner ike_waypoint_follower |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/uhobeike/ike_nav.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-12-19 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tatsuhiro Ikebe
Authors
ike_nav_rviz_plugins
Package overview
RVizによるウェイポイント/ナビゲーションの管理および可視化のROS 2 C++実装です。
How to use
Start Waypoint Folloer(ウェイポイントによるナビゲーションの開始)
①のボタンを押すと開始します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの停止)
②のボタンを押すと停止します。
①のボタンを押して再開すると、停止前のウェイポイントを目指します。
Stop Waypoint Folloer(ウェイポイントによるナビゲーションの中止)
③のボタンを押すと中止します。
①のボタンを押して再開すると、一番最初のウェイポイントを目指します。
New Waypoint Set(新しいウェイポイントのセット)
⑦にあるツールで新しいウェイポイントの配置ができます。
Delete Waypoint (現在の一番最後のウェイポイントを削除)
⑤を押すことでウェイポイントを削除します。
Delete All Waypoints(すべてのウェイポイントの削除)
⑤を押すことで全てのウェイポイントを削除します。
ナビゲーション中に行うと、ナビゲーションが中止されます。
New Waypoint Set(YAMLファイルにウェイポイントの情報を保存)
④を押すことで、現在のウェイポイントを保存するためのウィンドウが表示されます。
ファイル名を指定して保存することができます。
New Waypoint Set(YAMLファイルからウェイポイントの情報を読み込む)
⑧を押すことで、YAMLファイルに記述されたウェイポイントを読み込むためのウィンドウが表示されます。
ファイル名を指定して読み込むことができます。
LICENSE
Apache License, Version 2.0に基づいています。
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| ike_nav_msgs | |
| rviz_common | |
| rviz_rendering | |
| std_srvs | |
| ike_nav_parameters |