
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
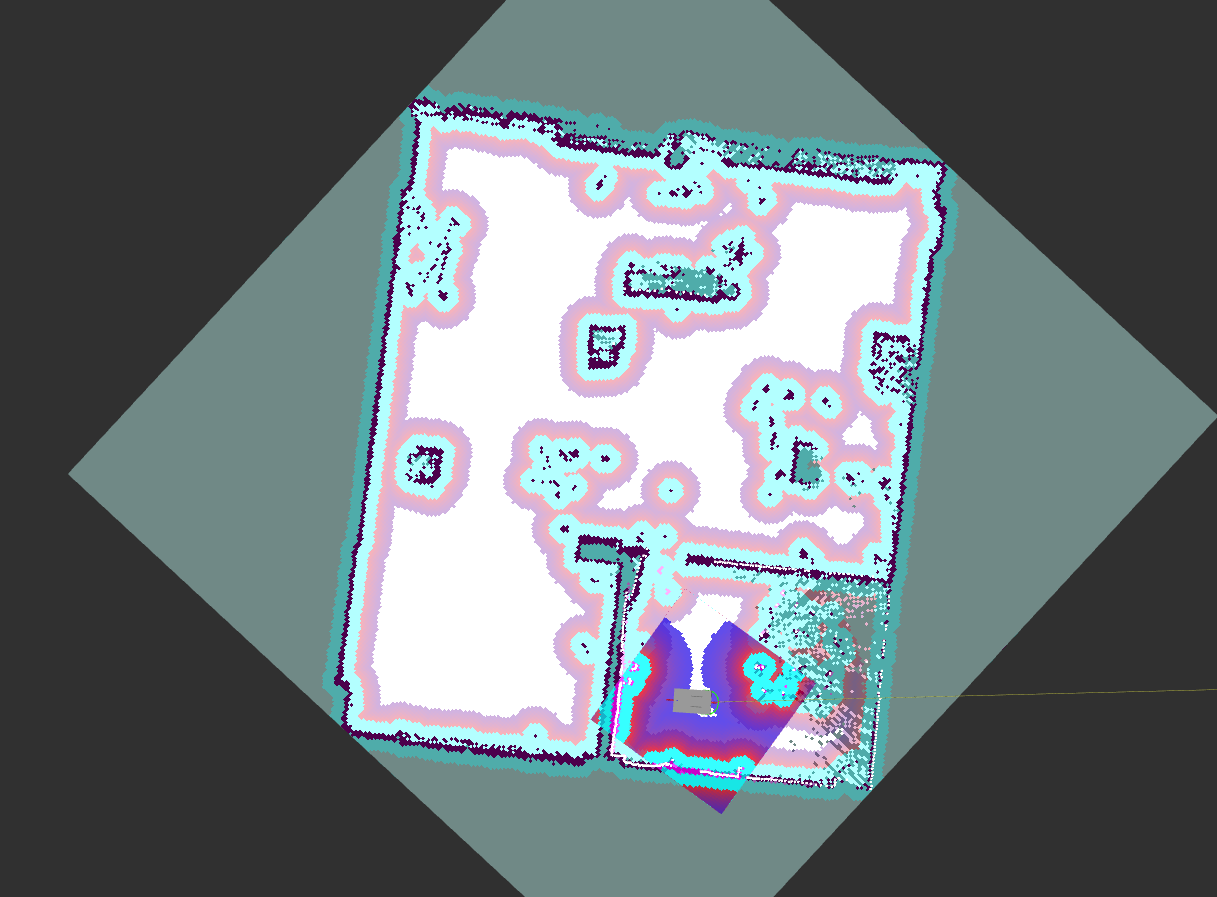
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_navigation2 at Robotics Stack Exchange
|
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_navigation2 at Robotics Stack Exchange
|
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_navigation2 at Robotics Stack Exchange
|
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_navigation2 at Robotics Stack Exchange
|
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_navigation2 at Robotics Stack Exchange
|
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_navigation2 at Robotics Stack Exchange
|
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_navigation2 at Robotics Stack Exchange
|
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged irc_ros_navigation2 at Robotics Stack Exchange
|
|
irc_ros_navigation2 package from irc_ros repoirc_ros_bringup irc_ros_controllers irc_ros_dashboard irc_ros_description irc_ros_examples irc_ros_hardware irc_ros_moveit_config irc_ros_msgs irc_ros_navigation2 |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/commonplacerobotics/irc_ros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-21 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Felix Reuter
Authors
- Felix Reuter
iRC ROS Navigation2
This package aims to provide all necessary features for using the mobile platforms based on CPR modules with ROS2. The model used here is a CPR Platform of medium size, more information about it can be found here. Currently basic movement commands and SLAM with the SICK laser scanners work.
Install
Navigation2 and Navigation2-bringup packages need to be installed. The instructions can be found here. Additionally the irc_ros_bringup package and all its requirements are necesssary to use the platform.
Usage
It is possible to manually send position goals via RVIZ. Another option with the Nav2 simple commander API can be found in the irc_ros_examples package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |