
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
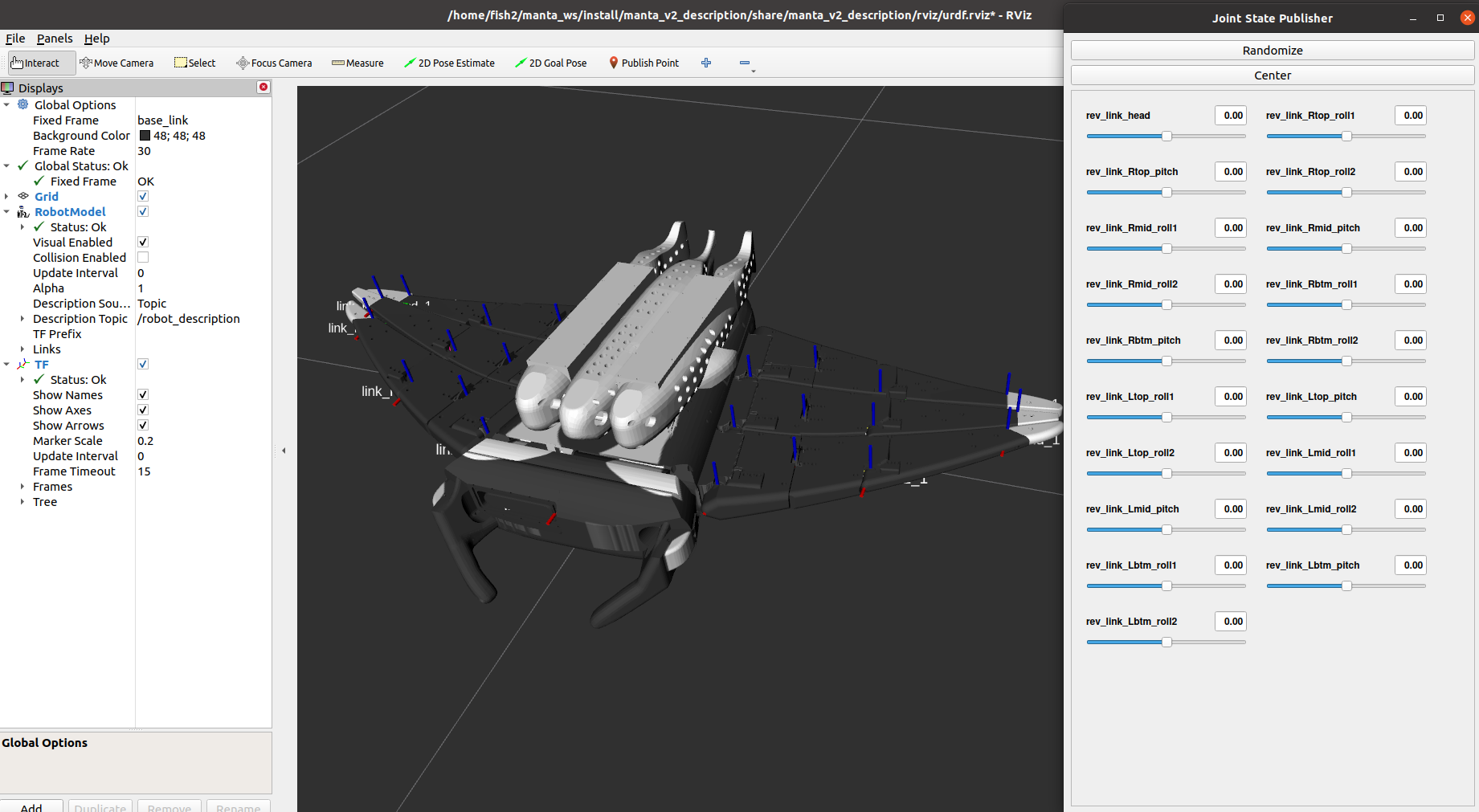
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged manta_v2_bringup at Robotics Stack Exchange
|
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged manta_v2_bringup at Robotics Stack Exchange
|
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged manta_v2_bringup at Robotics Stack Exchange
|
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged manta_v2_bringup at Robotics Stack Exchange
|
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged manta_v2_bringup at Robotics Stack Exchange
|
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged manta_v2_bringup at Robotics Stack Exchange
|
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged manta_v2_bringup at Robotics Stack Exchange
|
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged manta_v2_bringup at Robotics Stack Exchange
|
|
manta_v2_bringup package from manta_v2 repomanta_v2_bringup manta_v2_controller manta_v2_description manta_v2_gazebo_ros2_control manta_v2_moveit_config manta_v2_run_move_group |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 package suite of manta_v2. |
| Checkout URI | https://github.com/tasada038/manta_v2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-11-14 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | gazebo underwater-robotics ros2 moveit2 ros2-control |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Takumi Asada
Authors
manta_v2_bringup
This package contains launch files for loading manta_v2 in ROS2 and Rviz2 environments.
Install
If you have not installed the ‘joint-state-publisher-gui’ package, run the following command to install the joint-state-publisher-gui package.
sudo apt-get install ros-foxy-joint-state-publisher-gui
Example
This is an example of using the ‘joint_state_publisher_gui’ node and the ‘manta_v2_description’ package to check the configuration of manta_v2.
source ~/robot_ws/install/setup.bash
ros2 launch manta_v2_bringup manta_bringup.launch.py
You can check the posture of manta_v2 by directly entering each joint angle value or using the slider.
(* If you want to check the coordinate system of a specific link as shown in the picture, activate the Show Axes option in rviz2.)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |