
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
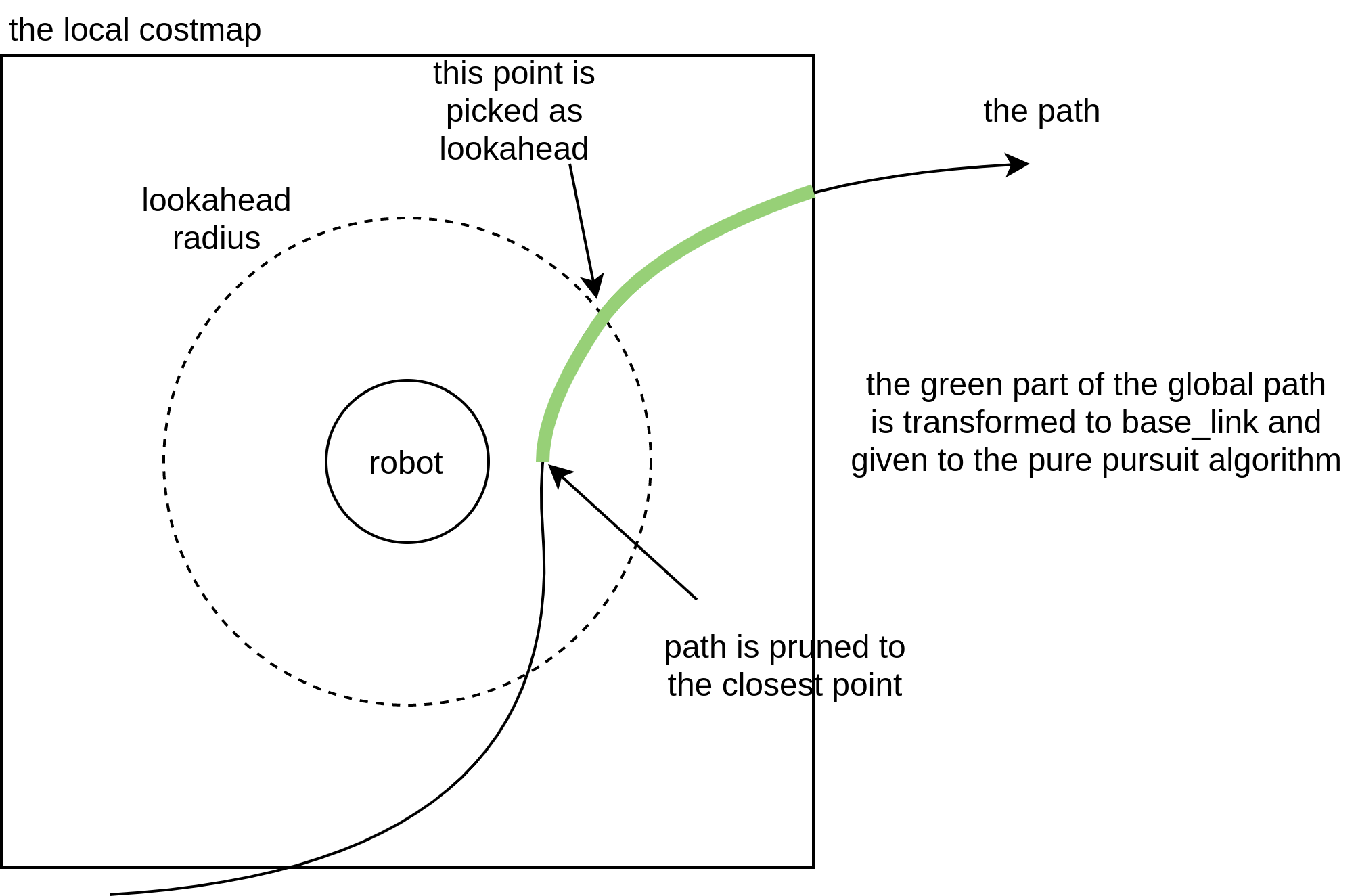
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_pure_pursuit_controller at Robotics Stack Exchange
|
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_pure_pursuit_controller at Robotics Stack Exchange
|
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_pure_pursuit_controller at Robotics Stack Exchange
|
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_pure_pursuit_controller at Robotics Stack Exchange
|
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_pure_pursuit_controller at Robotics Stack Exchange
|
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_pure_pursuit_controller at Robotics Stack Exchange
|
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_pure_pursuit_controller at Robotics Stack Exchange
|
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_pure_pursuit_controller at Robotics Stack Exchange
|
|
nav2_pure_pursuit_controller package from navigation2_tutorials reponav2_costmap_filters_demo nav2_gps_waypoint_follower_demo nav2_gradient_costmap_plugin nav2_pure_pursuit_controller semantic_segmentation_node semantic_segmentation_sim nav2_sms_behavior nav2_straightline_planner sam_bot_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ros-navigation/navigation2_tutorials.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-02-20 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shrijit Singh
Authors
Nav2 Pure pursuit controller
Tutorial code referenced in https://docs.nav2.org/plugin_tutorials/docs/writing_new_nav2controller_plugin.html
This controller implements a the pure pursuit algorithm to track a path.
How the algorithm works
The global path is continuously pruned to the closest point to the robot (see the figure below). Then the path is transformed to the robot frame and a lookahead point is determined. This lookahead point will be given to the pure pursuite algorithm to calculate a command velocity.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| nav2_bringup | |
| ament_cmake_gtest | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| pluginlib | |
| tf2 | |
| nav2_ros_common |