
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view

debug信息(图像处理中间过程信息/TODO)
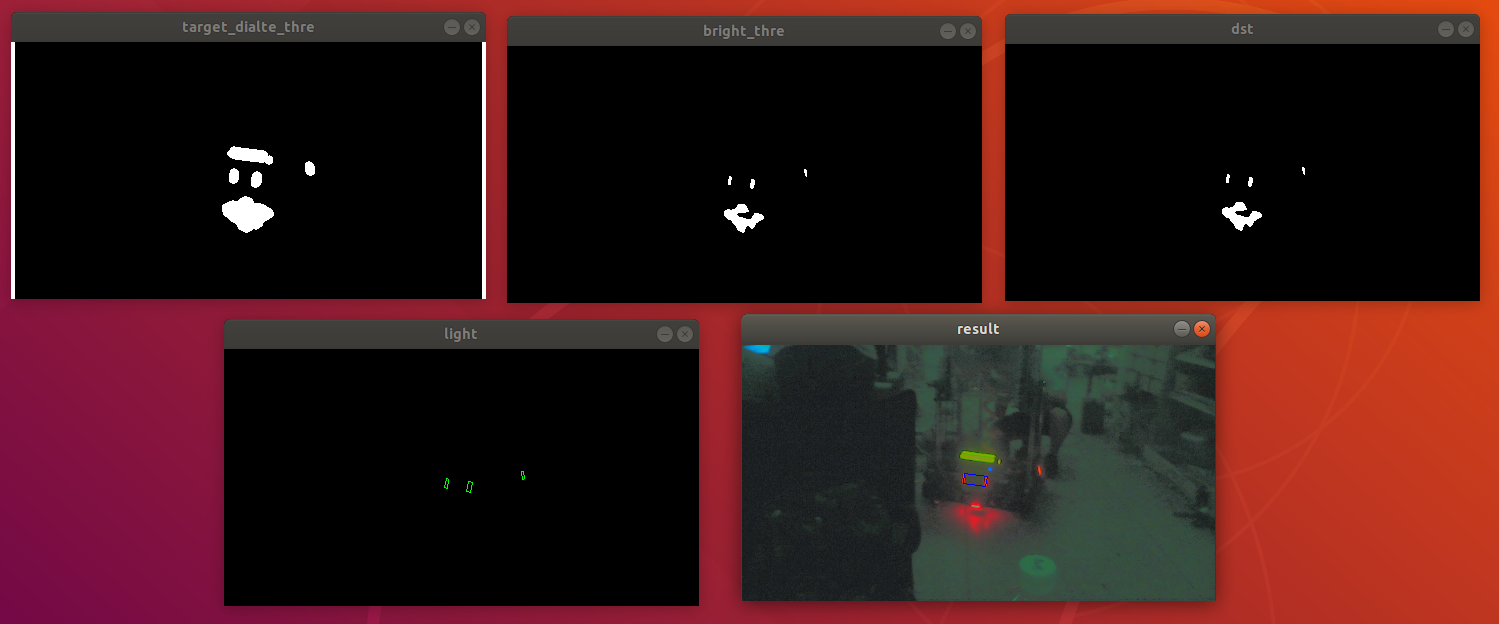
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rmoss_auto_aim at Robotics Stack Exchange
|
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view
debug信息(图像处理中间过程信息/TODO)
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rmoss_auto_aim at Robotics Stack Exchange
|
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view
debug信息(图像处理中间过程信息/TODO)
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rmoss_auto_aim at Robotics Stack Exchange
|
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view
debug信息(图像处理中间过程信息/TODO)
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rmoss_auto_aim at Robotics Stack Exchange
|
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view
debug信息(图像处理中间过程信息/TODO)
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rmoss_auto_aim at Robotics Stack Exchange
|
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view
debug信息(图像处理中间过程信息/TODO)
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rmoss_auto_aim at Robotics Stack Exchange
|
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view
debug信息(图像处理中间过程信息/TODO)
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rmoss_auto_aim at Robotics Stack Exchange
|
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view
debug信息(图像处理中间过程信息/TODO)
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rmoss_auto_aim at Robotics Stack Exchange
|
|
rmoss_auto_aim package from rmoss_contrib repormoss_auto_aim |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | RoboMaster OSS中的基础项目,为RoboMaster提供任务级功能模块包,如自动瞄准模块,能量机关模块等。 |
| Checkout URI | https://github.com/robomaster-oss/rmoss_contrib.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2022-09-12 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | ros2 robomaster |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- zhenpeng ge
Authors
rmoss_auto_aim模块
1.简介
rmoss_auto_aim模块是RoboMaster自瞄功能的一个简单实现,为步兵机器人或在其他射击机器人提供自瞄支持,通过摄像头识别敌方装甲板位置,计算出云台所需要转动的角度。
主要文件
- armor_detector.hpp/cpp : 装甲板识别模块 。
- simple_auto_aim_algo.hpp/cpp : 一个简单自瞄算法的实现, 包括装甲板识别,位置解算,预测等等。
- simple_auto_aim_node.hpp/cpp : ROS顶层模块
SimpleAutoAimNode, 主要由SimpleAutoAimAlgo,rmoss_cam::CamClient等模块构造。 - simple_auto_aim_main.cpp :
SimpleAutoAimNode的main入口。
2.快速使用
自瞄测试(图片模拟相机)
launch启动
ros2 launch rmoss_auto_aim simple_auto_aim.launch.py
查看相机图形
ros2 run rqt_image_view rqt_image_view
debug信息(图像处理中间过程信息/TODO)
若想取消图像debug信息,可以修改配置文件config/simple_auto_aim_params.yaml
debug : False
3.自瞄算法说明
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| rmoss_cam | |
| rmoss_util | |
| rmoss_interfaces | |
| rmoss_projectile_motion | |
| Eigen3 | |
| ament_cmake | |
| eigen3_cmake_module | |
| ament_lint_auto | |
| ament_lint_common |