
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
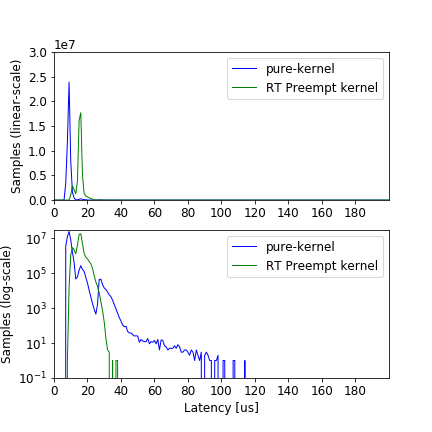
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros2_timer_latency_measurement at Robotics Stack Exchange
|
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros2_timer_latency_measurement at Robotics Stack Exchange
|
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros2_timer_latency_measurement at Robotics Stack Exchange
|
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros2_timer_latency_measurement at Robotics Stack Exchange
|
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros2_timer_latency_measurement at Robotics Stack Exchange
|
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros2_timer_latency_measurement at Robotics Stack Exchange
|
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros2_timer_latency_measurement at Robotics Stack Exchange
|
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros2_timer_latency_measurement at Robotics Stack Exchange
|
|
ros2_timer_latency_measurement package from ros2_timer_latency_measurement reporos2_timer_latency_measurement |
ROS Distro
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/hsgwa/ros2_timer_latency_measurement.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- hasegawa
Authors
ros2_timer_latency_measurement
Overview
This measure the accuracy of the timer when the priority of the ROS2-generated child thread change. Following Latencies are measured.
- Latency of nanosleep wake-up between child threads policies TS and RR
There are two patterns of child threads, as follows
- child threads : rclcpp::init() generated only.
- child threads : rclcpp::init() + node decleration generated
- Latency of Timer callback between nanosleep + spin_some vs spin
Each measurement point is as follows.
- nanosleep + spin_some : The latency between the time nanosleep expected to wake-up and the callback is actually called.
- spin : The latency between the time callback expected to be called and actually called.
Setup
Environment
The main environment is as follows:
- Hardware : Raspberry Pi 3B +
- OS : ubuntu 18.04 4.19.55-rt24-v7+
- ROS Distro : ROS 2 Eloquent Elusor
- DDS : FastRTPS(v1.9.3P1) or CycloneDDS(0.1.0)
For building environment, see setup.md.
Cyclictest results before and after setup.
Build
source ~/ros2_eloquent/install/setup.bash
cd ~/ros2_ws/src
git clone https://github.com/hsgwa/ros2_timer_latency_measurement.git
colcon build --symlink-install
Run
Example
source ~/ros2_eloquent/install/setup.bash
source ~/ros2_ws/install/local_setup.sh
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
taskset -c 1 ~/ros2_ws/build/ros2_timer_latency_measurement/init_thread \
--use_realtime_child_thread \
--timeseries_filename timeseries.csv \
--hist_filename raw/hist.csv \
--topn_filename raw/topn.csv \
--rttest_args -m 200mb -d 200mb -t 98 -s rr -u 10ms -i 720000
Excuetable files
The following is a list of executable files.
| executable file | measurement target | conditons |
|---|---|---|
| init_thread | nanosleep wake-up latency | rclcpp::init generated thread |
| init_and_node_thread_thread | nanosleep wake-up latency | rclcpp::init and DDS generated threads |
| timer_cb_latency_spin_some | callback latency | nanosleep + spin_some executor |
| timer_cb_latency_spin | callback latency | single thread executor |
Comand line options
Each executable can be configured with command line options.
| options | descriptions |
|---|---|
| –use_realtime_child_thread | Set child threads policy. real-time (inherit rttest_args) |
| –unuse_realtime_child_thread | Set child threads policy. TS |
| –timeseries_filename | Set filepath to export time-series cav data |
| –hist_filename | Set filepath to export histgram csv data |
| –topn_filename | Set filepath to export topN latency data. |
The options after –rttest_args will be sent to rttest. The availabile options are as follows. Here, rttest version is tag:0.9.0.
| options | descriptions |
|---|---|
| -m | Set maximum stack prefault size for static stack prefaulting. |
| -d | Set maximum heap prefault size for dynamic memory prefaulting. |
| -t | Set the thread priority of all threads launched by the test program. |
| -s | Set scheduling policy fifo/rr |
| -u | Specify the update period. |
| -i | Specify how many iterations to run the real-time loop. |
Please see rttest for more information on each option.
Results
Comparison of nanosleep wake-up latency between child threads policies TS and RR
File truncated at 100 lines see the full file