
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
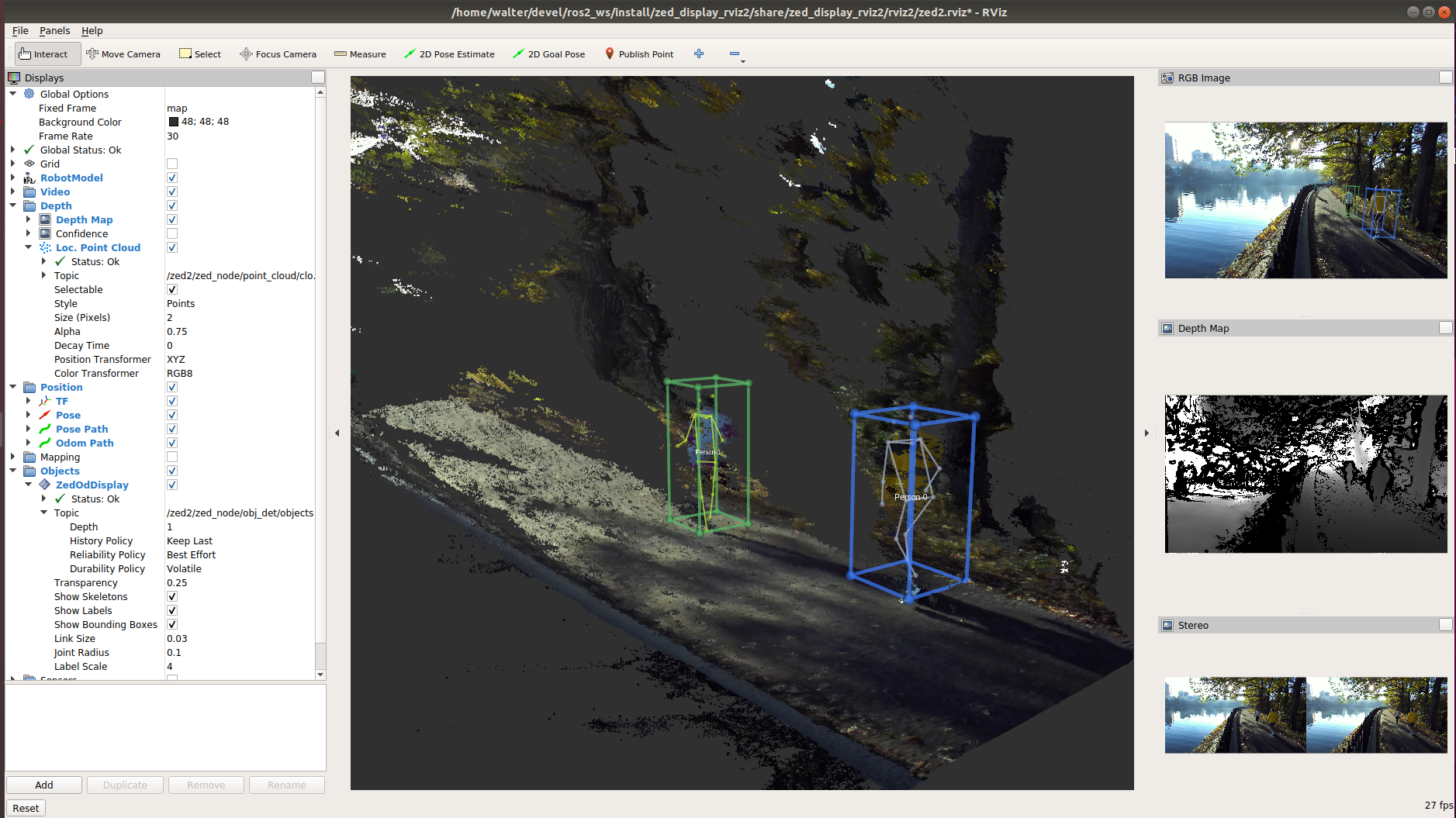
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_plugin_zed_od at Robotics Stack Exchange
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_plugin_zed_od at Robotics Stack Exchange
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_plugin_zed_od at Robotics Stack Exchange
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_plugin_zed_od at Robotics Stack Exchange
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_plugin_zed_od at Robotics Stack Exchange
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_plugin_zed_od at Robotics Stack Exchange
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_plugin_zed_od at Robotics Stack Exchange
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_plugin_zed_od at Robotics Stack Exchange
Package Summary
| Version | 5.2.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-01 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Object Detection Plugin
This package lets you visualize in the ROS 2 RViz application all the information provided by the Object Detection module of the ZED SDK used together with a ZED2 camera.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitxroy or ROS 2 Humble Hawksbill:
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Please replace <camera_model> with the model of the camera that you are using: 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Note: Object Detection and Body Tracking are not available with the “ZED” Gen.1 camera.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| zed_description | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format | |
| rviz_common | |
| rviz_ogre_vendor | |
| rviz_rendering | |
| zed_msgs |