
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
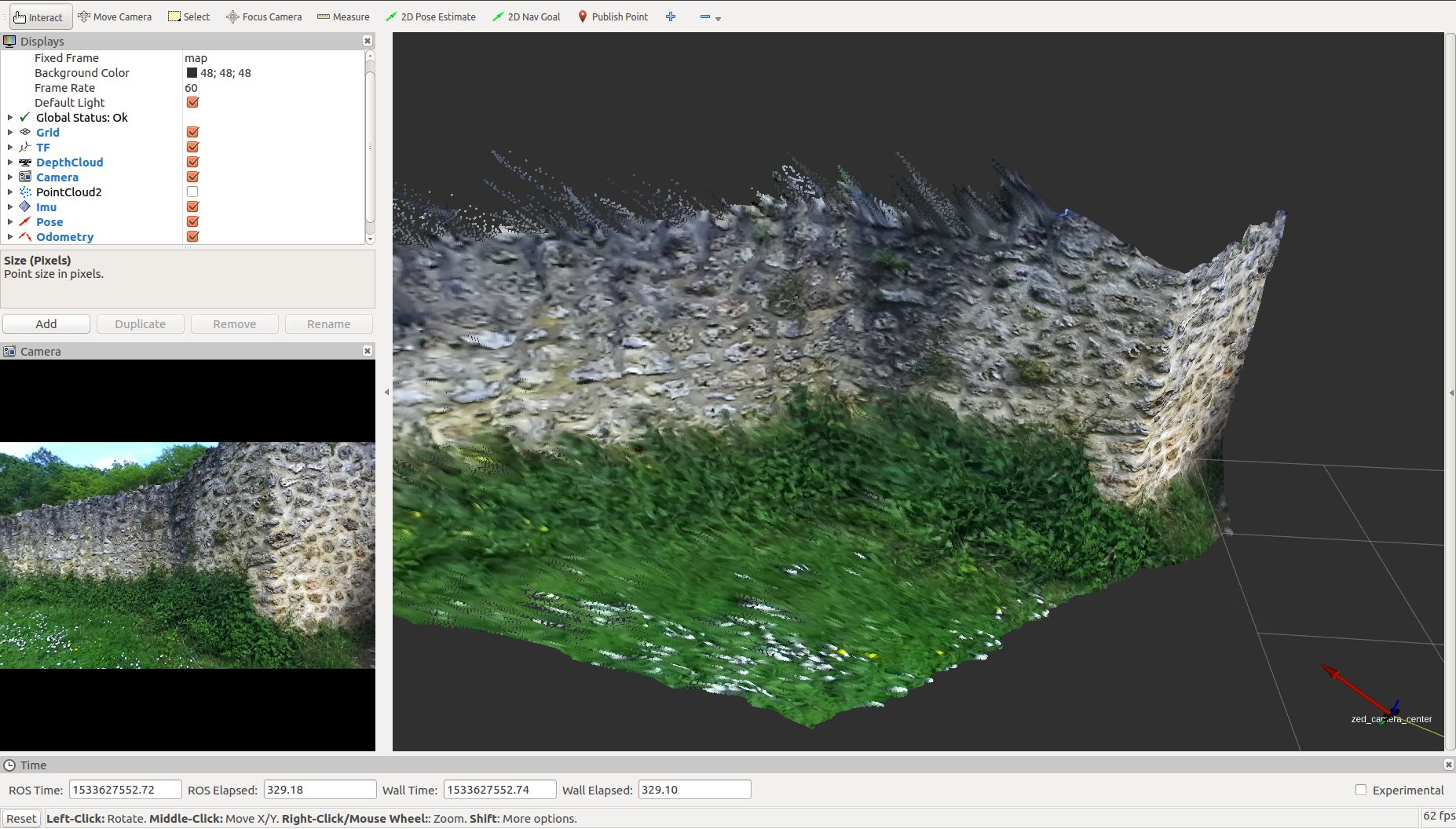
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged zed_display_rviz2 at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged zed_display_rviz2 at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged zed_display_rviz2 at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged zed_display_rviz2 at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged zed_display_rviz2 at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged zed_display_rviz2 at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged zed_display_rviz2 at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged zed_display_rviz2 at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 5.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A collection of examples and tutorials to illustrate how to better use the ZED cameras in the ROS2 framework |
| Checkout URI | https://github.com/stereolabs/zed-ros2-examples.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-11-11 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | examples tutorials zed ros2 rviz-plugins |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- STEREOLABS
Authors
Stereolabs ZED Camera - ROS 2 Display package
This package lets you visualize in the ROS 2 RViz application all the possible information that can be acquired using a Stereolabs camera. The package provides the launch files for ZED, ZED Mini and ZED 2 camera models.
Note: The main package zed-ros2-wrapper is required to correctly execute the ROS node to acquire data from a Stereolabs 3D camera.
Getting started
- First, be sure to have installed the main ROS package to integrate the ZED cameras in the ROS framework: zed-ros2-wrapper
- Install the package
- Read the online documentation for More information
Prerequisites
- ROS 2 Foxy Fitzroy (deprecated), ROS 2 Humble Hawksbill, or ROS 2 Jazzy Jalisco:
- Foxy on Ubuntu 20.04 - [Not recommended. EOL reached]
- Humble on Ubuntu 22.04 - [EOL May 2027]
- Jazzy Jalisco on Ubuntu 24.04 - [EOL May 2029]
Installation
The zed_display_rviz2 is a colcon package.
Install the zed-ros2-wrapper package following the installation guide
Install the zed-ros2-examples package following the installation guide
Execution
Use the following launch command to start the ZED ROS2 Wrapper node and RVIZ2 with the default setting for the camera that you are using:
$ ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=<camera_model>
Replace <camera_model> with the model of the camera that you are using: 'zed', 'zedm', 'zed2', 'zed2i', 'zedx', 'zedxm', 'virtual'.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| ament_cmake | |
| rviz2 | |
| launch_ros | |
| robot_state_publisher | |
| zed_wrapper | |
| zed_msgs | |
| zed_components | |
| grid_map_rviz_plugin | |
| ament_lint_auto | |
| ament_lint_common | |
| ament_cmake_clang_format |