No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
carla-e2e-av-stack repositoryaloam_velodyne sc_aloam_velodyne loam_utils vehicle_ctrl carla_msgs lidar_to_grid pcl_conversions pcl_ros perception_pcl |
Repository Summary
| Description | This repository contains the code for an end-to-end autonomous vehicle stack, including perception, planning, and control, built for CARLA. |
| Checkout URI | https://github.com/soumya997/carla-e2e-av-stack.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-31 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aloam_velodyne | 0.0.0 |
| sc_aloam_velodyne | 0.0.0 |
| loam_utils | 0.0.0 |
| vehicle_ctrl | 0.0.0 |
| carla_msgs | 1.3.0 |
| lidar_to_grid | 0.0.1 |
| pcl_conversions | 2.6.1 |
| pcl_ros | 2.6.1 |
| perception_pcl | 2.6.1 |
README
Carla E2E AV Stack
This repository offers a ready-to-use perception and control stack for autonomous vehicles, designed to streamline development and testing in CARLA. With a simple plug-and-play approach, it provides a foundational pipeline for experimenting with perception algorithms and integrating outputs with planning and control, saving time and letting you focus on innovation.
currently its capable of,
- load any town’s lanelet map
- spawn and set goal using rviz
- Use A-LOAM or SC-A-LOAM for odometry.
- evaluate odometry based on MSE-ATE, and scale error.
- Waypoint following using PID control.
- Run in both ROS1 and ROS2
- EKF sensor fusion of IMU and LiDAR
- Add Occupancy grid carla E2E AV
Articles:
- Setup ROS2 with Carla: https://learnopencv.com/ros2-and-carla-setup-guide/
- About building this project: https://learnopencv.com/pid-controller-ros-2-carla/
- LiDAR SLAM: https://learnopencv.com/lidar-slam-with-ros2/
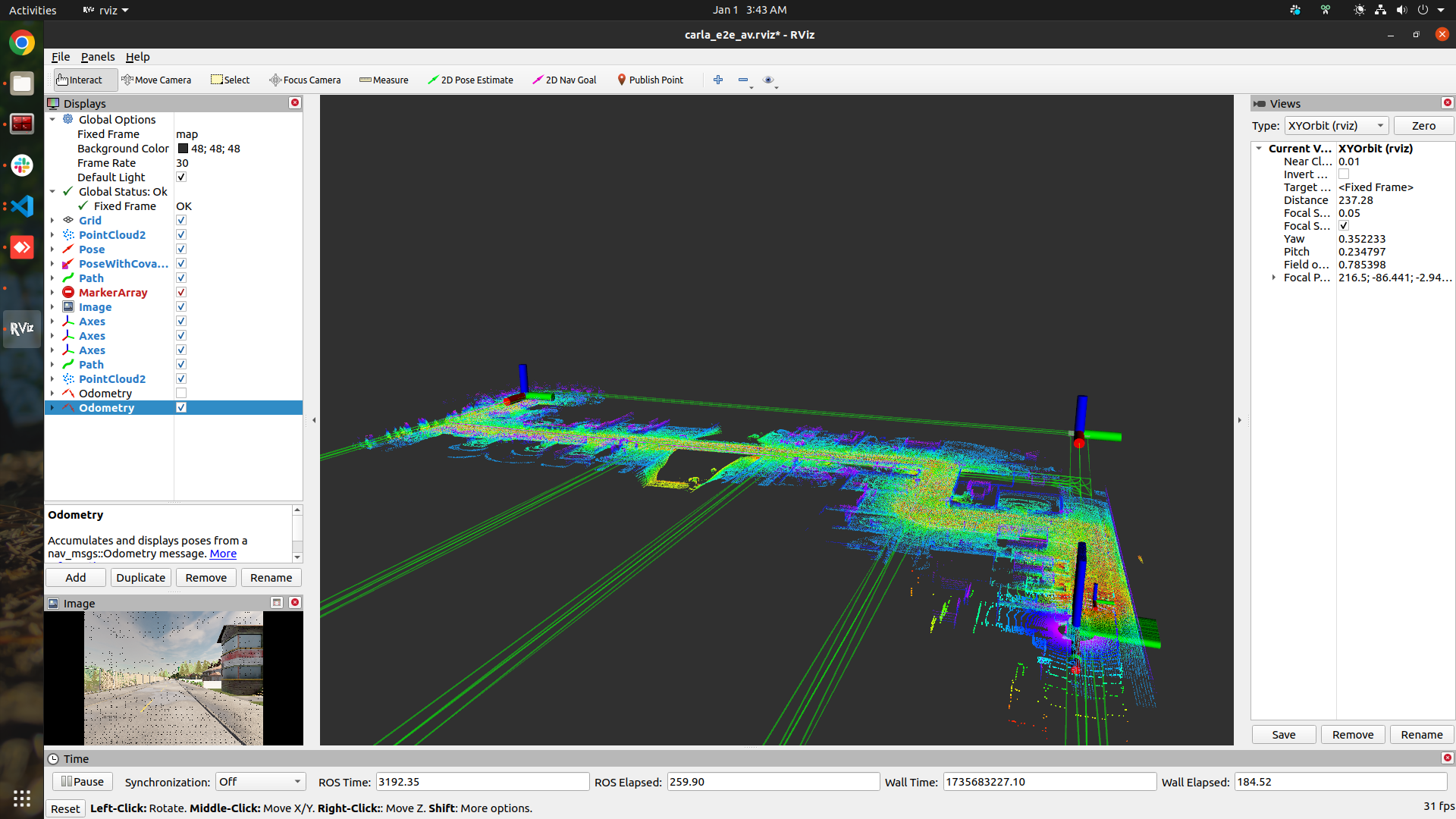
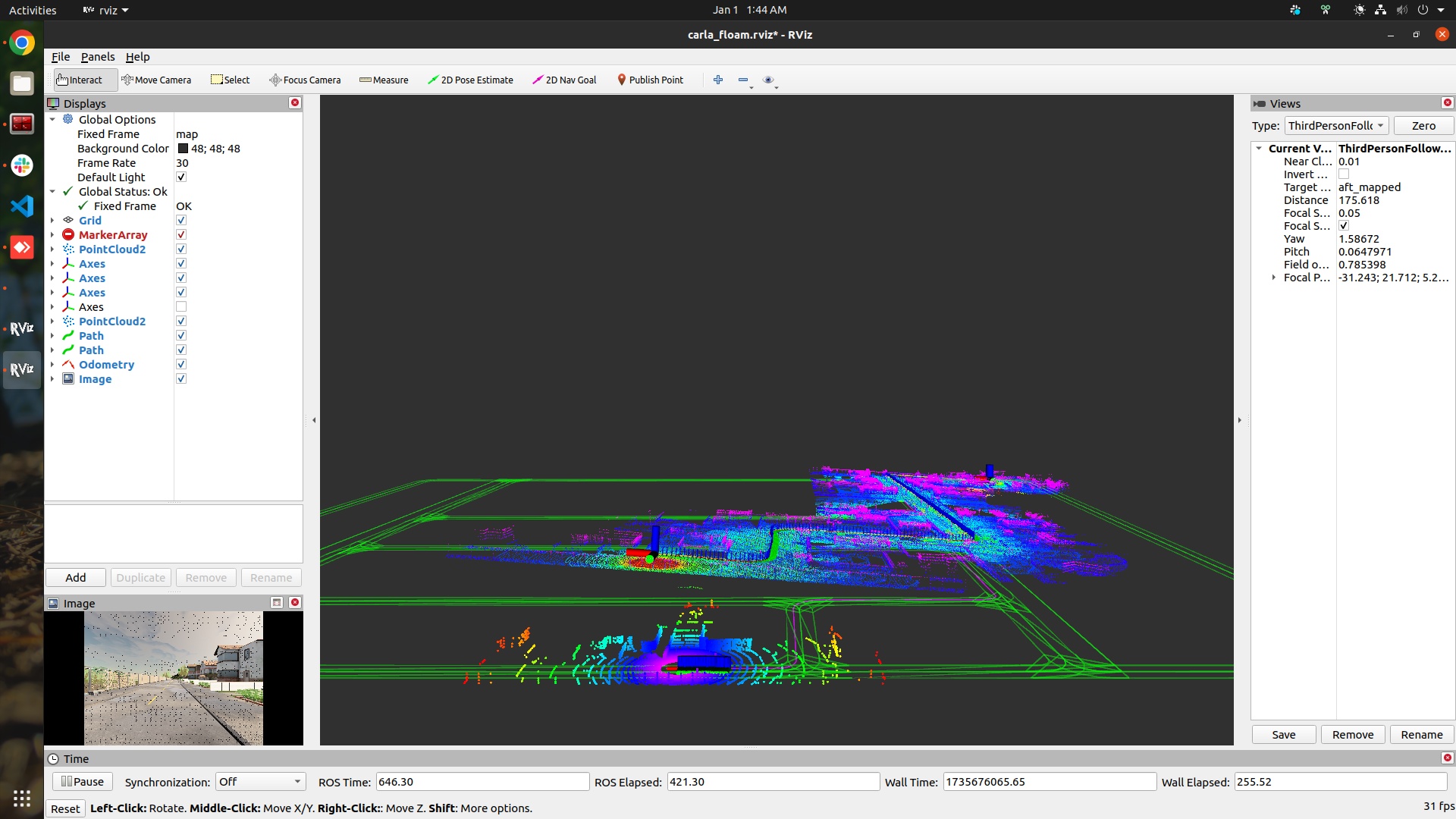
A-LOAM and SC-A-LOAM comparison
Below are two separate tables summarizing A-LOAM and SC-A-LOAM performance based on latency and memory.
| A-LOAM | SC-A-LOAM |
|---|---|
 |
 |
 |
 |
A-LOAM
| Parameter | Value |
|---|---|
| Odom Rate | 20 Hz (/aft_mapped_path) |
| Map Rate | 1 Hz (/laser_cloud_map) |
| RMS ATE | 0.9114 m |
| Scale Error | 0.15% |
| /alaserMapping | 159800 byte (~159.8 KB) |
| /alaserOdometry | 142164 byte (~142.164 KB) |
| /ascanRegistration | 32060 byte (~32.06 KB) |
SC-A-LOAM
| Parameter | Value |
|---|---|
| Odom Rate | 10 Hz (/aft_pgo_path) |
| Map Update | 0.100 Hz (/aft_pgo_map) |
| Map Node | 233.840 kb |
| Odometry | 142.240 kb |
| PGO | 110.800 kb |
| Scan Registration | 32.004 kb |
| RMS ATE | 14 - 20 m |
| Scale Error | 0.37% |
Download bagfile
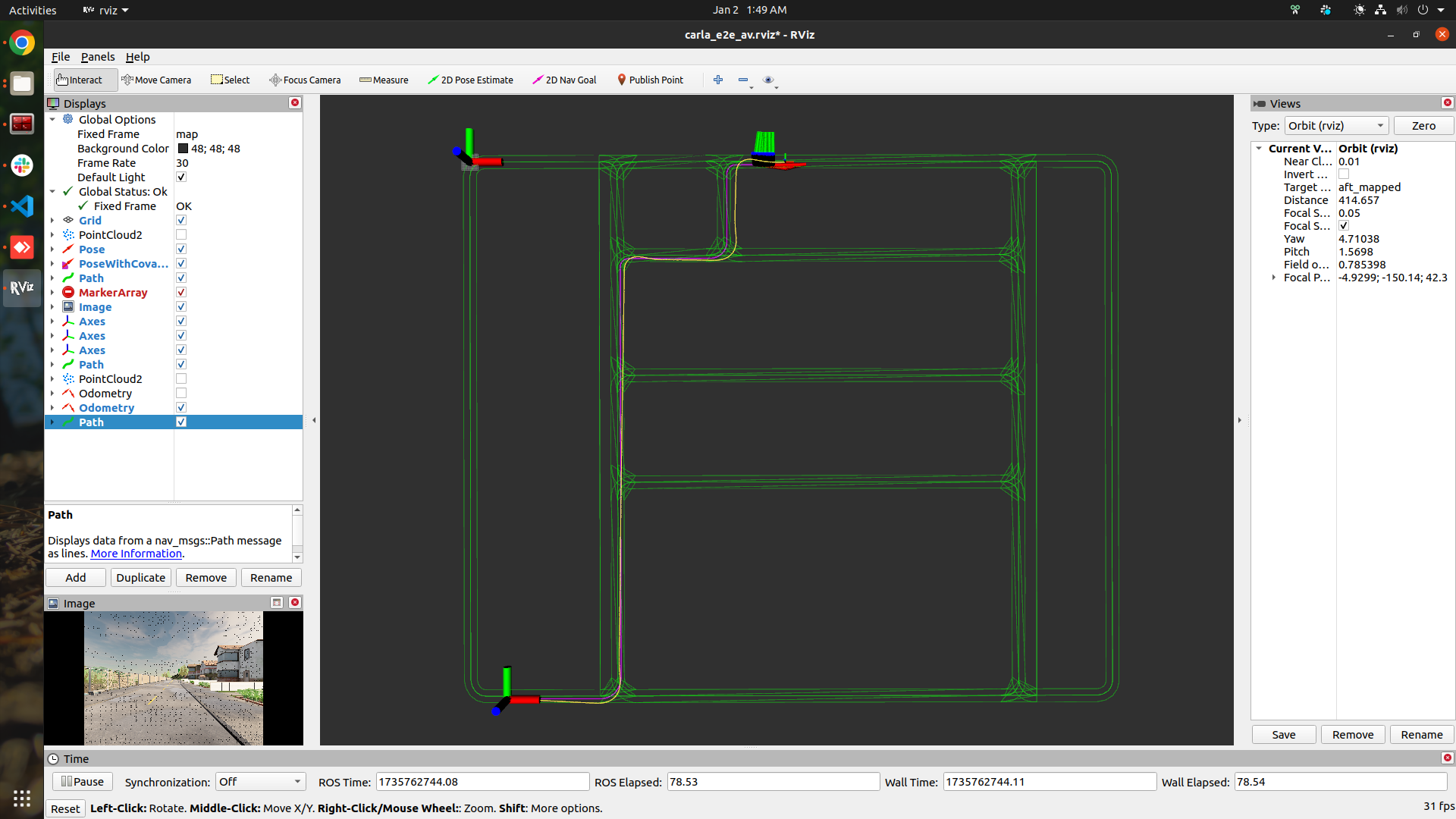
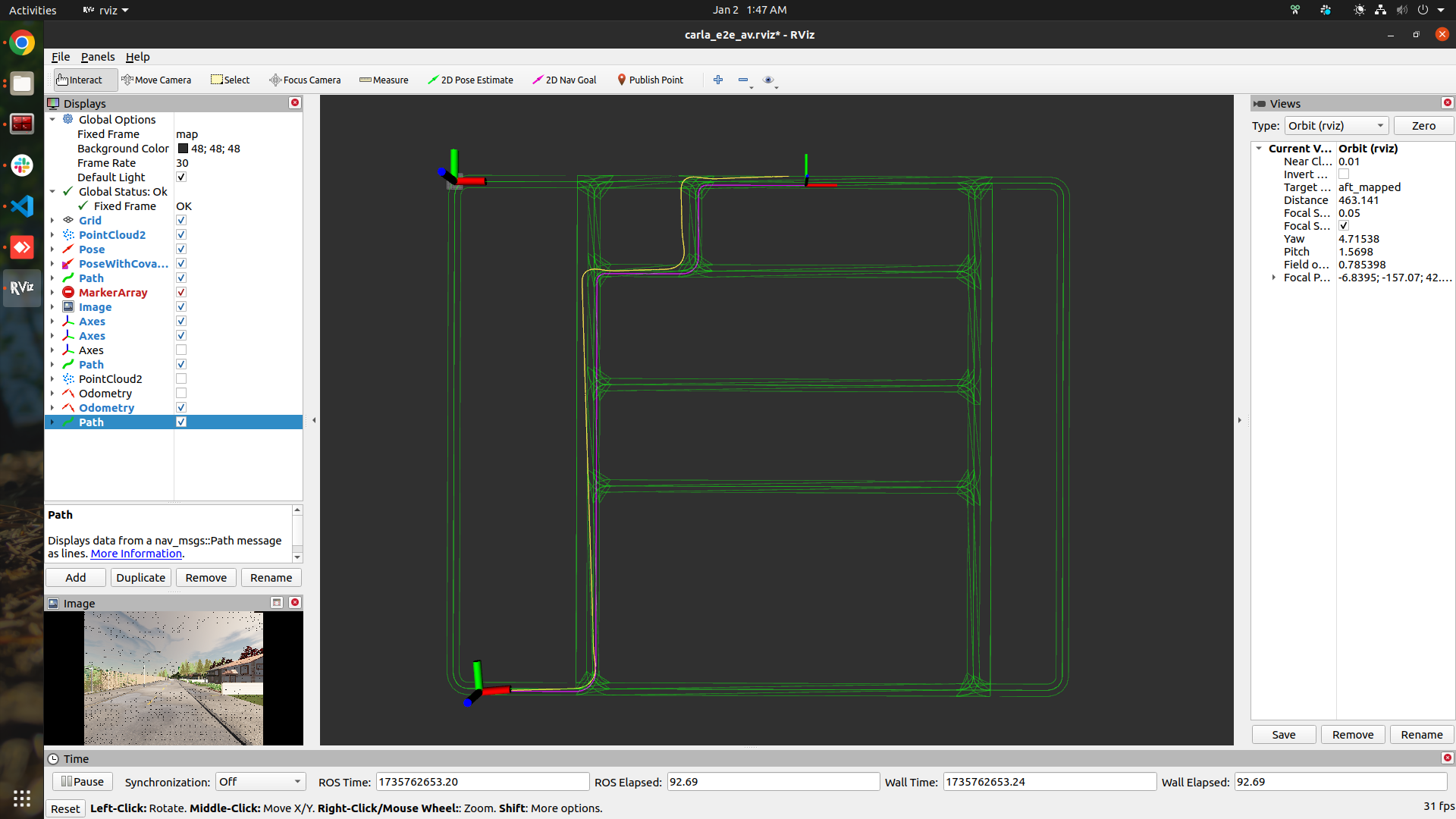
Comparison based on the a fixed trajectory
| A-LOAM | SC-A-LOAM |
|---|---|
 |
 |
Dependency
- Carla 0.9.11
- ROS1 noetic and ROS2 humble
- Ceres Solver , PCL and PCL-conversitions
Run ROS1 code
Run the AV stack without odometry from LOAM in ROS1
build:
```python $ git clone https://github.com/soumya997/carla-e2e-av-stack.git
File truncated at 100 lines see the full file
CONTRIBUTING
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.